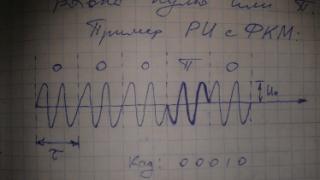
FCM è la divisione dell'impulso radio originale in n parti di uguale durata e in contatto tra loro. in questo caso è possibile sfasare le parti adiacenti. Il sistema più utilizzato è un sistema antifase in cui l'offset è 0 o.
Esempio di RI con FCM:

Riso. Codice 00010
Ricevitore RI con FCM.
Riso. Schema strutturale.

LZ – linea di ritardo, PV – sfasatore, RI – impulso radio.
La caratteristica principale del ricevitore considerato è che la parte centrale dell'impulso radio in uscita è n volte (n=5) più breve della durata dell'impulso radio in ingresso. Pertanto, RF con FCM, così come RF con RFM, vengono utilizzati per distinguere tra target ravvicinati.
Consideriamo la seguente domanda: quali codici consentono di creare un ricevitore in cui l'impulso radio centrale ha un'ampiezza n volte maggiore dell'ampiezza degli impulsi radio laterali (poiché solo in questo caso si può parlare di restringimento del sondaggio impulso radio n volte all'ingresso del ricevitore radio).
RF con FCM avente questa proprietà hanno codici che vengono chiamati Codici Barker. Quanti codici Barker sono conosciuti? Oggi sono noti codici con numeri fino a n = 13:
|
Codici Barker |
|
Disegna tu stesso uno schema a blocchi per n=7.
Generazione di RF con FCM.

Effetto dell'interferenza passiva sulla rilevazione del segnale radar.
L'interferenza passiva è l'interferenza che si verifica come risultato della riflessione dei segnali di sondaggio provenienti da oggetti che non sono bersagli. Possono essere di origine naturale (nuvole, neve) o artificiale (riflettori mascheranti).
Il prerequisito fisico per separare i segnali riflessi da un bersaglio in rapido movimento (aereo) e da un ostacolo che si muove lentamente (nuvole) è lo spostamento Doppler del segnale. Ad esempio: km/h -Hz, km/h -Hz (offset relativo alla frequenza).
Filtro ottimale per il rumore “non bianco”.
Lasciamo che la densità spettrale di potenza del rumore o dell'interferenza non bianca sia caratterizzata dalla dipendenza . Usiamo la trasformazione di questa dipendenza in una che non ha più una dipendenza dalla frequenza, cioè la stessa del rumore bianco. Un tale convertitore si chiama filtro sbiancante. Lascia che sia la risposta in frequenza di un tale filtro. Allora deve essere. Questa scelta è determinata dall'espressione della potenza sonora totale. Pertanto, l’espressione dell’integrando non dipenderà dalla frequenza, a differenza del rumore bianco. I limiti reali dell’integrazione sono finiti. Di conseguenza, lo spettro del rumore sbiancato può essere successivamente trasformato allo stesso modo del rumore bianco, cioè si possono utilizzare OF precedentemente sviluppati.
Lo schema a blocchi del ricevitore di interferenza passiva ottimale sarà simile a:

Il rapporto di trasmissione dell'intero dispositivo sarà
Espressione del guadagno in frequenza del filtro ottimale per l'interferenza “non bianca”.
Nel caso speciale dell'utilizzo del rumore bianco.
Analisi grafica del coefficiente di trasmissione.
Riso. 
Ricevitore ottimale di impulsi radio.
Lo spettro di una sequenza periodica di impulsi radio è lineare, con i parametri caratteristici mostrati in figura.
Riso. Spettro per una sequenza infinita ().


Se la sequenza contiene m impulsi e m > 1, allora ogni riga dello spettro si allarga.
A causa dell'effetto Doppler, lo spettro dell'interferenza viene spostato rispetto allo spettro del segnale proveniente dal bersaglio, in modo che le componenti di frequenza di uno spettro si trovino nell'intervallo tra le componenti di frequenza dell'altro spettro (vedi figura) .
Riso. 
Dalla figura risulta che l'interferenza può essere eliminata utilizzando un filtro multibanda, in cui le bande passanti sono posizionate come le bande dello spettro target e le bande di assorbimento sono posizionate come le bande dello spettro interferenti. Tale filtro è chiamato filtro di reiezione del pettine (CRF).

Attualmente rimangono pertinente nei radar il compito è la risoluzione e nei sistemi di trasmissione delle informazioni il compito è distinguere i segnali.
Per risolvere questi problemi si possono utilizzare segnali FCM codificati da insiemi di funzioni ortogonali che, come è noto, hanno correlazione incrociata nulla.
Per risolvere i segnali nel radar, è possibile utilizzare un segnale burst, ciascun impulso del quale è codificato da una delle righe di una matrice ortogonale, ad esempio la matrice Vilenkin-Chrestenson o Walsh-Hadamard. Questi segnali hanno buone caratteristiche di correlazione, che ne consentono l'utilizzo per i compiti sopra menzionati. Per distinguere tra segnali nei sistemi di trasmissione dati, è possibile utilizzare lo stesso segnale con un duty cycle pari a uno.
La matrice Vilenkin-Chrestenson può essere utilizzata per formare una polifase ( P-phase) segnale FCM e la matrice di Walsh-Hadamard, come caso speciale della matrice di Vilenkin-Chrestenson per il numero di fasi pari a due, per formare un segnale bifasico.
È noto che i segnali polifase hanno un'elevata immunità al rumore, segretezza strutturale e un livello relativamente basso di lobi laterali della funzione di autocorrelazione. Tuttavia, per elaborare tali segnali, è necessario spendere un numero maggiore di operazioni di addizione e moltiplicazione algebrica a causa della presenza di parti reali e immaginarie dei campioni di segnale, il che porta ad un aumento del tempo di elaborazione.
Le sfide di discriminazione e risoluzione possono essere esacerbate dallo spostamento Doppler a priori sconosciuto della frequenza portante dovuto al movimento relativo della sorgente e dell'abbonato o del radar e del bersaglio, che complica anche l'elaborazione del segnale in tempo reale a causa della presenza di ulteriori canali di elaborazione Doppler .
Per elaborare i suddetti segnali aventi un'addizione di frequenza Doppler, si propone di utilizzare un dispositivo costituito da un registro di ingresso, un processore di conversione discreto, un'unità di connessione incrociata e un insieme di unità di generazione del segnale ACF identiche, che sono sequenzialmente registri a scorrimento collegati.
Se prendiamo la matrice ortogonale di Vilenkin-Chrestenson come matrice di base per l'elaborazione di un segnale burst polifase, la trasformazione discreta si trasformerà in una trasformata discreta di Vilenkin-Chrestenson-Fourier.
Perché Poiché la matrice di Vilenkin-Chrestenson può essere fattorizzata utilizzando l'algoritmo di Goode, la trasformata discreta di Vilenkin-Chrestenson-Fourier può essere ridotta alla trasformata veloce di Vilenkin-Chrestenson-Fourier.
Se prendiamo la matrice ortogonale di Walsh-Hadamard come matrice di base - un caso speciale della matrice di Vilenkin-Chrestenson per l'elaborazione di un segnale burst bifasico, la trasformazione discreta si trasformerà in una trasformata discreta di Walsh-Fourier, che per fattorizzazione può essere ridotta alla trasformata veloce di Walsh-Fourier.
Segnali complessi o ad alta intensità energetica risolvono richieste contrastanti di maggiore portata di rilevamento e risoluzione. Il campo di rilevamento aumenta quando si utilizzano segnali di sonda ad alta energia. Un aumento è possibile aumentando la potenza o la durata del segnale. La potenza di picco in un radar è limitata dall'alto dalle capacità del generatore di radiofrequenze e soprattutto dalla potenza elettrica delle linee di alimentazione che collegano questo generatore all'antenna. Quando si utilizzano array a fasi, la potenza di picco è limitata dalla potenza massima dei moduli array a fasi. Pertanto, è più semplice aumentare aumentando la durata del segnale. Tuttavia, i segnali di lunga durata non hanno una buona risoluzione della portata. Segnali complessi con una base ampia possono risolvere queste contraddizioni. Attualmente sono ampiamente utilizzati due tipi di segnali complessi: modulati in frequenza lineare (chirp) e codificati in modo discreto (DCS).
Segnale modulato in frequenza lineare. Se, all'interno della durata dell'impulso, la frequenza portante viene modulata secondo una legge lineare con una grande deviazione di frequenza, la base del segnale sarà grande e l'inviluppo della densità spettrale del segnale di ingresso si avvicinerà a quello rettangolare, cioè Quindi, all'uscita del filtro ottimale, un inviluppo del segnale della forma
![]()
dov'è la densità spettrale del segnale all'uscita del filtro ottimale con il coefficiente di trasmissione
Mediante la trasformata di Fourier all'interno dell'ampiezza dello spettro Aeos, troviamo il segnale di uscita:
![]()
Effettuando una sostituzione otteniamo
Si può vedere che l'impulso all'uscita del filtro ottimale ha un inviluppo della forma

dove è il ritardo del segnale nel filtro.
La durata dell'impulso di uscita al livello di 0,637 è Pertanto, l'impulso viene accorciato o compresso di un fattore. Il rapporto di compressione è uguale alla base del segnale.
Esempio. Costruiamo un diagramma temporale di un impulso radio rettangolare con modulazione di frequenza lineare intraimpulso. Parametri del segnale: ampiezza, frequenza media, durata del segnale, larghezza dello spettro

Riso. 4.10. Tipo di segnale acustico
Soluzione. L'espressione analitica del segnale (Fig. 4.10) ha la forma

dove è il rapporto di compressione (base del segnale).

Riso. 4.11. Il processo di “compressione” di un chirp - impulso radio: a - inviluppo del segnale di ingresso; b - legge del cinguettio; c - inviluppo del segnale in uscita
Nella fig. La Figura 4.11 mostra i grafici che illustrano il processo di compressione di un impulso radio con un trillo.
Il segnale ha i seguenti parametri:

Filtri di compressione. Come filtri di compressione possono essere utilizzati dispositivi con caratteristiche di frequenza di ampiezza rettangolare e frequenza di fase quadratica, ad esempio linee di ritardo (DL) di un segnale con prese (Fig. 4.12, a, b). Se l'LP non ha proprietà dispersive, le prese vengono posizionate in modo non uniforme a diversi intervalli di ritardo e quindi assicurano la somma in fase dei segnali quando l'impulso chirp si propaga lungo l'LP. Se viene utilizzato un LP dispersivo, in cui la velocità di variazione del tempo di ritardo di gruppo dalla frequenza è di segno opposto alla velocità di variazione della frequenza del segnale chirp nel tempo, le prese sono posizionate uniformemente lungo l'LP.

Riso. 4.12. Linea di ritardo non dispersiva (a) e linea di ritardo dispersiva (b)

Riso. 4.13. Linea di ritardo ultrasonica dispersiva a base di tensioattivi
Per comprimere gli impulsi radio chirp, le più comunemente utilizzate sono le linee di ritardo ultrasoniche dispersive (DULZ) sulle onde acustiche superficiali (SAW), che sono sottili lastre di materiali piezoelettrici (quarzo piezoelettrico sintetico, niobato di litio, germanato di bismuto, ecc.), su cui vengono applicate griglie metalliche trasmittenti e riceventi elettrodi (Fig. 4.13).
I parametri principali dell'obiettivo includono la frequenza operativa, la larghezza di banda e il tempo di ritardo, i cui valori dipendono dal materiale dell'obiettivo.
Ad esempio, si consideri un DULZ (JSC Avangard), progettato per comprimere un impulso radio chirp di durata con deviazione di frequenza, operante ad una frequenza
Il filtro su un laser di questo tipo produce perdite e ha un livello di lobi laterali.Il numero di elettrodi nella griglia del convertitore è .
L'impulso compresso ha una forma che aumenta il rischio di mascherare i lobi principali dell'impulso radio compresso, riflesso da un bersaglio con RCS basso (Fig. 4.14), da parte dei lobi laterali di un segnale forte. Per contrastare questo fenomeno si utilizza l'elaborazione ponderale dei segnali nel dominio del tempo o della frequenza mediante appositi filtri di correzione (Fig. 4.15), solitamente costruiti secondo uno schema trasversale.

Riso. 4.14. Mascherare un segnale debole (goal 2) con il lobo laterale di un segnale forte (goal

Riso. 4.15. Circuiti di ponderazione per l'elaborazione dei segnali chirp nel dominio del tempo e della frequenza
Nelle prese dei filtri di compressione trasversale sono installati amplificatori, i cui coefficienti di trasmissione corrispondono ai coefficienti di ponderazione della funzione di correzione. Nel DULZ a base di tensioattivi, i coefficienti di peso richiesti si ottengono modificando la lunghezza degli elettrodi della serie.
L'elaborazione della ponderazione può essere implementata utilizzando le seguenti funzioni di ponderazione del filtro di correzione:
1) Funzione peso di Dolph-Chebyshev (Fig. 4.16);
2) Funzione peso di Taylor;
3) funzione peso generale:

Un caso speciale della funzione peso di Taylor è la funzione peso di Hamming:
Lo schema a blocchi del filtro c è mostrato in Fig. 4.17 Il filtro di soppressione è implementato sotto forma di due linee di ritardo collegate in serie a tre amplificatori di peso e un sommatore. Con questa elaborazione, il livello dei lobi laterali diminuisce a Tuttavia, il lobo principale si espande di circa 1,47 volte e il rapporto segnale-rumore in potenza diminuisce di 1,34 volte rispetto al rapporto segnale-rumore all'ingresso di il filtro Hamming.
Il livello dei lobi laterali diminuisce in proporzione inversa al tempo per tutti i tipi di elaborazione del peso, ad eccezione della funzione peso di Dolph-Chebyshev, dove rimane invariato. In questo caso il lobo principale si espande leggermente e le perdite di energia aumentano rispetto alla lavorazione ottimale (senza filtro di correzione). Oltre ai filtri di correzione, per combattere i lobi laterali, vengono utilizzati il cambiamento della forma (pre-enfasi) dei segnali di sondaggio e la modulazione di frequenza non lineare intra-impulso.

Riso. 4.16. Risposta in frequenza del filtro di correzione Dolph-Chebyshev

Riso. 4.17. Diagramma a blocchi del filtro di Hamming
Segnali codificati discreti (DCS) Immaginiamo un modello di un corpo di incertezza che soddisfi i requisiti per un segnale di sondaggio ad alta intensità energetica con alta risoluzione simultaneamente nel tempo e nella frequenza (portata e velocità sotto forma di un piedistallo di spessore e un cono affilato con un asse coincidente con
con asse di altezza 1 e base ellittica poggiante su piedistallo (Fig. 4.18).
Dividiamo il corpo della FNSS in due parti: informativa e non informativa, e
![]()
Sia la durata l'ampiezza dello spettro del segnale, quindi secondo la Fig. 4.19 il volume informativo rappresenta il volume del picco principale (punta), e il volume non informativo rappresenta un piedistallo parallelo al volume. Richiediamo che Per questo sia necessario che ad es. il valore dovrebbe essere minore quanto maggiore è l'area su cui è “distribuito” il volume
Come puoi vedere, per soddisfare questa condizione, il segnale deve essere sia duraturo che a banda larga, cioè trattare segnali complessi con una base ampia. Questi ultimi possono essere segnali simili al rumore (NL) e molto spesso segnali codificati in modo discreto (DCS).

Riso. 4.18. Modello della funzione di incertezza di un segnale complesso
La codifica discreta dei segnali può essere eseguita per fase, frequenza e ampiezza, separatamente o simultaneamente. Tipicamente, la DCS è divisa in codificata per ampiezza (ADKS), frequenza (PDKS) e fase (FDKS). Un segnale codificato in modo discreto è un impulso radio con una durata costituito da elementi di impulso più brevi (discreti) con una durata di tk, strettamente adiacenti l'uno all'altro (vedere Fig. 4.20, a). Analiticamente il DCS può essere scritto come segue:

dove sono i parametri di modulazione del codice di una sequenza di discreti che può contenere codici; numero di sequenza di codici discreti; numero di discreti nel segnale; impulso di ampiezza standard con durata tk (durata dell'elemento di codice):

In questo caso la durata del segnale è Poiché - è un parametro energetico, per mantenere invariata l'energia del segnale durante i calcoli è necessario normalizzare la (4.17) utilizzando un divisore aggiuntivo. Dall'espressione generale (4.17) seguono le formule che descrivono la DCS con diversi tipi di codifica. Quando abbiamo un segnale codificato in ampiezza (ADKS):

O per altri valori
Quando riceviamo un segnale codificato in frequenza (FCS). Indichiamo allora

O per altri valori
Più spesso di altri vengono utilizzati segnali FDCS o i cosiddetti segnali modulati in codice di fase (PCM) e manipolati in fase (PM). In questo caso e

Il numero di valori che assumono le fasi iniziali degli elementi del codice è chiamato base della sequenza del codice. Quando abbiamo una sequenza binaria.
Una sequenza FCM binaria si ottiene quando la fase iniziale dell'elemento assume uno dei due valori o . Quindi il codice può essere specificato come sequenza di valori di fase
come sequenza di istruzioni o come sequenza di caratteri del codice
A volte nel materiale illustrativo, invece dei simboli, vengono utilizzati i simboli corrispondenti
Pertanto, la formazione di una sequenza di codice binario si riduce alla specificazione di valori discreti

La logica dei simboli è determinata dalla regola:
Nella fig. La Figura 4.19 mostra la vista di un segnale radio-impulso binario (PM) con chiave di sfasamento (a) e la sequenza di codice corrispondente. I codici Barker binari e le sequenze sono più spesso usati come sequenze di codici binari di segnali con chiave di sfasamento. I codici Barker forniscono livelli dei lobi laterali pari ad es.

Il processo di elaborazione ottimale e compressione temporale di un impulso con PCM intra-impulso utilizzando un codice Barker a sette cifre è mostrato in Fig. 4.19.
La compressione dell'impulso FCM viene effettuata utilizzando una linea di ritardo (DL) con prese e un sommatore, i segnali a cui dalla LZ vengono forniti tramite prese direttamente o con una rotazione di fase di , ad es. inversamente, per garantire la sequenza di somma dei discreti mostrata in Fig. 4.19, g. Inoltre, il processo di somma è illustrato utilizzando una sequenza di codici, quindi la fase iniziale corrisponde e la fase corrisponde a. La legge del cambio di segno dal primo all'ultimo tocco (dall'inizio della LZ alla fine) è inversa al codice C, le fasi iniziali dell'impulso radio (codice in Fig. 4.19, d). Questo codice è un'immagine speculare del codice in banda base e rappresenta la risposta all'impulso del filtro ottimale. Il cambiamento nella fase dei segnali parziali su ciascuna delle prese LZ quando un segnale radio lo attraversa è mostrato in Fig. 4.19, g.
Riso. 4.19. (vedi scansione) Elaborazione di un impulso radio FCM con un codice Barker a sette elementi in un filtro ottimale: a - tipo di impulso radio FCM; b - codice binario delle fasi iniziali dei discreti; c - schema a blocchi del dispositivo di elaborazione (filtro ottimale); r - sequenza di sommatoria di discreti; d - risultato della somma dei discreti; e - segnale di uscita
Si può vedere che quando l'inizio dell'impulso radio raggiunge l'ultimo tocco e la fine i primi segnali parziali su tutti e sette i colpi
avrà lo stesso segno (fase) e somma in fase. L'uscita produrrà il massimo segnale possibile: il picco principale con una durata. A destra e a sinistra di questo picco ci sono tre lobi laterali con un'ampiezza. Il filtro è adattato a un impulso PCM con una durata e serve per aumentare l'uscita del filtro ottimale. Tuttavia, i codici Barker sono noti solo per
Con un codice Barker a tredici cifre, l'impulso può essere compresso fino a un massimo di 13 volte e il livello minimo dei lobi laterali DCF sarà 1/13 dell'ampiezza del picco principale del segnale di uscita del filtro ottimale. Nella fig. La Figura 4.20 mostra l'FNSS di un segnale con codifica del codice di fase tramite il codice Barker a

Riso. 4.20. Vista dell'FNSS con modulazione di fase mediante il codice Barker
Per aumentare il rapporto di compressione, quindi, per migliorare la risoluzione del bersaglio in portata e velocità, nonché per ridurre il livello dei lobi laterali, vengono utilizzate sequenze di codici ricorrenti lineari, che praticamente non hanno restrizioni sulla durata del codice.
Come sequenze di codici ricorrenti vengono spesso utilizzate sequenze -o codici di lunghezza massima, che vengono formati utilizzando relazioni ricorrenti, che ne consentono la formazione su registri a scorrimento coperti da connessioni di retroazione. Le sequenze sono divise in periodiche, quando il periodo di ripetizione del codice è uguale alla sua durata, e non periodiche (troncate), quando è maggiore. Molto spesso, una sequenza viene specificata come una sequenza di caratteri
Per la radice 2, il valore del carattere corrente della sequenza di codice dipende dai caratteri precedenti e viene calcolato dalla formula

dove può essere uguale a o 1.
Il valore è chiamato memoria di sequenza del codice e determina il numero di celle nel registro a scorrimento che forma il codice. A
Quando si forma una sequenza di codice, viene specificato un blocco iniziale arbitrario o una combinazione iniziale di simboli di codice, composta da simboli. L'intera sequenza si ottiene utilizzando la relazione di ricorrenza (4.21).
Elenchiamo alcune proprietà di base delle sequenze:
1) -le sequenze contengono elementi e hanno una durata;
2) la somma di due sequenze modulo 2 in simboli dà nuovamente una sequenza;
3) il livello dei lobi laterali DCF per una sequenza periodica con un periodo è uguale a, e per una sequenza singola (troncata) non periodica di durata è uguale a
4) il numero di diverse sequenze ricorrenti lineari massimali con la stessa è determinato dall'algoritmo dove è la funzione di Eulero.
Per formare una sequenza di codifica (modulazione), vengono solitamente utilizzati registri a scorrimento, coperti secondo determinate regole dal feedback delle prese di registro. Le regole per implementare le connessioni di feedback nei registri che formano un codice basato su sequenze lineari ricorrenti di massima lunghezza possono essere determinate utilizzando i cosiddetti polinomi caratteristici delle sequenze di codici.
UDC 621.396.96:621.391.26
Un metodo per aumentare l'efficienza del radar nel rilevamento di persone dietro ostacoli otticamente opachi
O. V. Sytnik I. A. Vyazmitinov, E. I. Miroshnichenko, Yu. A. Kopylov
Istituto di Radiofisica ed Elettronica da cui prende il nome. A. Ya. Usikova NAS dell'Ucraina
Vengono prese in considerazione le possibilità di ridurre il livello dei lobi laterali della funzione di autocorrelazione dei segnali di sondaggio FCM e i problemi della loro implementazione pratica nelle apparecchiature. È stata proposta una modulazione intrapulse ottimale fase-ampiezza, che consente di ridurre i lobi laterali e allo stesso tempo aumentare la velocità di ripetizione dei messaggi di sondaggio. Vengono studiati i fattori che influenzano le caratteristiche di tali segnali e viene proposto un criterio per la loro fattibilità nelle apparecchiature.
Introduzione.
Gli algoritmi di elaborazione del segnale in un radar con un segnale di sondaggio quasi continuo progettati per rilevare oggetti nascosti dietro ostacoli otticamente opachi sono generalmente costruiti sul principio dell'elaborazione di correlazione ottimale o del filtraggio adattato [-].
I segnali di sondaggio per tali radar vengono selezionati in base al requisito di garantire la necessaria risoluzione e immunità al rumore. In questo caso, si cerca di rendere la funzione di incertezza del segnale a forma di matita nel piano corrispondente con un livello minimo di lobi laterali. Per questo vengono utilizzati vari tipi complessi di modulazione [, ,]. I più comuni sono: segnali modulati in frequenza; segnali multifrequenza; segnali codificati a spostamento di fase; segnali con modulazione di fase del codice; segnali a frequenza discreta o segnali con modulazione di frequenza del codice; segnali compositi con modulazione di frequenza del codice e una serie di segnali che sono una combinazione di diversi tipi di modulazione. Più stretto è il picco principale della funzione di incertezza del segnale e più basso è il livello dei suoi lobi laterali, maggiore sarà la risoluzione e l'immunità al rumore del radar. Il termine “immunità al rumore” in questo lavoro indica la resistenza del radar alle interferenze causate dalle riflessioni del segnale di sondaggio da oggetti che non sono bersagli e situati al di fuori dello strobo analizzato (frequenza, tempo). In letteratura tali segnali sono chiamati segnali a base lunga o segnali a banda ultralarga (UWB).
Una delle varietà di segnali UWB sono i segnali con chiave di fase, che rappresentano una sequenza codificata di impulsi radio, le cui fasi iniziali cambiano secondo una determinata legge. Sequenze di codici di lunghezza massima o M-le sequenze hanno proprietà molto importanti per il radar:
· M-le sequenze sono periodiche con periodo , dove è il numero di impulsi elementari nella sequenza; − durata di un impulso elementare;
· Il livello dei lobi laterali della funzione di incertezza per una sequenza periodica è − , e per una singola sequenza di impulsi − ;
· Gli impulsi in un periodo della sequenza, diversi per fasi, frequenze, durate, sono distribuiti con uguale probabilità, il che dà motivo di considerare questi segnali pseudocasuali;
· Formazione M-le sequenze vengono eseguite semplicemente sui registri a scorrimento e il numero di bit del registro è determinato dalla lunghezza di un periodo della sequenza - dalla relazione.
Lo scopo di questo lavoro è studiare le possibilità di ridurre il livello dei lobi laterali della funzione di incertezza dei segnali modulati M-sequenze.
Formulazione del problema.
La Figura 1 mostra un frammento di una funzione modulante formata da una sequenza periodica (qui ci sono due periodi M-sequenze con
).
Sezione lungo l'asse temporale della funzione di incertezza di un segnale radio da esso modulato M-la sequenza è mostrata in Fig. 2. Il livello dei lobi laterali, come previsto dalla teoria, è 1/7 o meno 8,5 dB.
Consideriamo la possibilità di minimizzare i lobi laterali della funzione di incertezza del segnale FCM. Indichiamo con il simbolo M-sequenza, la durata di un periodo è pari a . In tempo discreto, a condizione che , l'algoritmo per il calcolo degli elementi della successione può essere scritto nella seguente forma:
(1)
Il segnale radio emesso dal localizzatore è il prodotto del segnale armonico della portante
, (2)
Dove
− vettore dei parametri per la funzione modulante (1) -
. (3)
La potenza del segnale è distribuita tra i lobi laterali della funzione di incertezza -
(4)
e il petalo principale -
, (5)
dove il simbolo *− denota l'operazione di coniugazione complessa e i limiti di integrazione nei domini del tempo e della frequenza sono determinati dal corrispondente tipo di modulazione del segnale.
Atteggiamento
(6)
può essere considerata come la funzione obiettivo di un problema di ottimizzazione parametrica.
Algoritmo per la risoluzione del problema.
La soluzione al problema di ottimizzazione (6) è stimare il parametro -
, (7)
dove è il dominio di definizione del vettore.
Il modo tradizionale per calcolare la stima (7) è risolvere il sistema di equazioni -
. (8)
La soluzione analitica (8) risulta essere piuttosto laboriosa, quindi utilizzeremo una procedura di minimizzazione numerica basata sul metodo di Newton
, (9)
dove è la quantità che determina la lunghezza del passo della procedura per la ricerca dell'estremo della funzione obiettivo.
Un modo per calcolare la lunghezza del passo è calcolare:
. (10)
Nel caso più semplice, quando il vettore è composto da un parametro, ad esempio o , il segnale di sondaggio viene generato in modo relativamente semplice. In particolare, quando si ottimizza la funzione obiettivo per parametro, il segnale viene generato secondo la relazione
. (11)
Nella fig. La Figura 3 mostra un frammento del modulo della funzione di autocorrelazione del segnale (11) in , che corrisponde ad un segnale radio PCM senza modulazione di fase intraimpulso.
Il livello del lobo laterale di questa funzione corrisponde al limite teorico pari a , dove . Nella fig. La figura 4 mostra un frammento del modulo della funzione di autocorrelazione del segnale (11) con il parametro ottenuto ottimizzando la funzione (). Il livello dei lobi laterali è meno 150 dB. Lo stesso risultato si ottiene con la modulazione di ampiezza M-sequenze. Nella fig. La Figura 5 mostra l'aspetto di tale segnale al valore ottimale.
Riso. 5. Frammento di un segnale FCM modulato in ampiezza
Il segnale di tastatura viene generato secondo l'algoritmo
. (12)
La modulazione simultanea di ampiezza e fase porta ad una diminuzione del lobo laterale di un altro ordine di grandezza. Non è possibile raggiungere il livello zero del lobo laterale a causa degli inevitabili errori di calcolo della procedura ricorrente di minimizzazione della funzione obiettivo (), che non consentono di trovare il vero valore del parametro, ma solo la sua certa vicinanza - . Nella fig. La Figura 6 mostra la dipendenza dei valori dei coefficienti di modulazione di fase ottimali dal parametro , che determina la lunghezza della sequenza.
Riso. 6. Dipendenza dello sfasamento ottimale dalla lunghezza M- sequenze
Dalla fig. 6 si vede che all'aumentare della lunghezza della sequenza il valore dello sfasamento ottimale tende asintoticamente a zero e a possiamo supporre che il segnale ottimale con modulazione di fase intraimpulso non sia praticamente diverso da un segnale PCM convenzionale. La ricerca mostra che all'aumentare della lunghezza del periodo di modulazione PSP, la sensibilità relativa alla distorsione del segnale diminuirà.
Un criterio analitico per la scelta della lunghezza della sequenza limite può essere la seguente relazione
, (13)
dove è un numero che determina la possibilità di implementazione tecnica di un segnale con modulazione intrapulse nell'apparecchiatura.
Valutare la fattibilità di complicare il segnale.
L'inevitabile complicazione del segnale con una diminuzione dei lobi laterali della funzione di autocorrelazione restringe notevolmente i requisiti per i dispositivi di generazione e i percorsi di trasmissione e ricezione del segnale. Pertanto, se si verifica un errore nell'impostazione del moltiplicatore di fase su un millesimo di radiante, il livello del lobo laterale aumenta da meno 150 dB a meno 36 dB. Con la modulazione di ampiezza, l'errore relativo al valore ottimale del coefficiente UN un millesimo porta ad un aumento del lobo laterale da meno 150 dB a meno 43 dB. Se gli errori nell'impostazione dei parametri sono 0,1 rispetto a quelli ottimali, che possono essere implementati nell'apparecchiatura, il lobo laterale della funzione di incertezza aumenterà a meno 15 dB, ovvero 7 - 7,5 dB migliore che in assenza di ulteriori modulazione di fase e di ampiezza.
D'altra parte, il lobo laterale della funzione di incertezza può essere ridotto senza complicare il segnale aumentandolo. Quindi al livello dei lobi laterali ci saranno circa meno 15 dB. Va notato che i segnali PCM ordinari (cioè senza modulazione AM-FM aggiuntiva) sono sensibili agli errori che si verificano durante la loro formazione. Quindi la lunghezza M-È anche poco pratico aumentare indefinitamente le sequenze nei dispositivi radar reali.
Consideriamo l'influenza degli errori che si verificano nelle apparecchiature durante la formazione, trasmissione, ricezione ed elaborazione dei segnali radio FCM sulle loro proprietà.
Valutazione dell'influenza degli errori nella formazione di un segnale FCM sulle sue proprietà.
L'intero insieme di fattori che influenzano le caratteristiche del segnale può essere suddiviso in due gruppi: fluttuazione e deterministico.
I fattori di fluttuazione includono: instabilità della frequenza di fase degli oscillatori di riferimento; rumori di vario genere; segnali che fuoriescono dal trasmettitore direttamente all'ingresso del ricevitore e, dopo l'elaborazione della correlazione con il segnale di riferimento, formano processi simili al rumore e altri fattori.
I fattori deterministici includono: banda larga insufficiente dei circuiti formanti; asimmetria della funzione modulante; incoerenza della funzione modulante e dell'oscillazione della portante; differenza nella forma dei segnali di riferimento e di tastatura, ecc.
Più in generale, l'espressione analitica per un segnale modulato da uno pseudocasuale M- sequenza, rappresentatela nella forma
, (14)
Dove ; - ampiezza costante; O P- fase del segnale; N=2K-1; K-numero intero; -durata dell'impulso elementare che costituisce la sequenza.
La sua funzione di correlazione bidimensionale è scritta come:
(15)
A
, , e il suo spettro normalizzato è mostrato in Fig. 7. Qui, per chiarezza, viene mostrato un frammento dell'asse della frequenza, dove sono concentrate le componenti principali dello spettro del segnale. Una caratteristica di tale segnale, come si può vedere dalla Fig. 7, è il livello ridotto dell'oscillazione della portante non modulata, che nel caso ideale tende a zero.
Fig.7. Spettro del segnale normalizzato
L'ampia banda di spettro e l'assenza di oscillazioni periodiche non modulate consente di implementare algoritmi di rilevamento e identificazione di oggetti in sistemi di localizzazione come , con segnale utile indebolito in presenza di ostacoli di 40-50 dB e livelli di interferenza correlata superiori al segnale di 50- 70dB.
Riso. 8. Densità spettrale del segnale distorto
Nel caso in cui le distorsioni del segnale siano specificate da funzioni deterministiche nelle coordinate spostamento Doppler - ritardo, è più conveniente tenere conto della loro influenza sui parametri della funzione di autocorrelazione del segnale, ad esempio sotto forma di errore di inseguimento funzioni.
Pertanto, per un segnale pseudo-casuale con chiave di fase con N=15, la dipendenza del livello del lobo laterale residuo della funzione di autocorrelazione dalla larghezza di banda dei circuiti formanti e dal percorso radio è mostrata in Fig. 9.
Fig.9. Dipendenza del livello del lobo laterale ACF dalla larghezza di banda
trasmissione del percorso di formatura per K=4
Qui, l'asse delle ordinate mostra il valore che determina il livello massimo ottenibile dal lobo laterale della funzione di autocorrelazione - un segnale modulato da un segnale pseudocasuale M- sequenza, e lungo l'asse delle ascisse - espresso in percentuale, il rapporto tra la larghezza di banda del circuito formatore e il valore massimo della frequenza dello spettro efficace del segnale. I punti nel grafico mostrano i valori del livello dei lobi laterali ACF ottenuti dalla simulazione numerica degli effetti hardware. Come si vede dalla Fig. 9, in assenza di distorsioni di frequenza nei cammini radio, il livello del lobo laterale del segnale ACF modulato dalla fase del PSP periodico con periodo N, È – 1/ N. Ciò corrisponde al limite teorico noto. Quando lo spettro del segnale modulato è limitato, il livello del lobo laterale aumenta e con una limitazione del 50% raggiunge il livello che corrisponde ad una funzione di autocorrelazione non periodica. Un'ulteriore limitazione dello spettro del segnale radio porta al collasso quasi completo dell'ACF e, di conseguenza, all'incapacità di utilizzare il segnale per scopi pratici.
Le distorsioni dello spettro del segnale emesso dal locatore e delle oscillazioni di riferimento che arrivano al correlatore, dovute all'asimmetria tra livelli positivi e negativi e alla durata delle oscillazioni modulanti, portano ad un aumento significativo delle interferenze nella zona del lato lobi dell'ACF e deterioramento della risoluzione spaziale e delle caratteristiche di rilevamento del localizzatore. La dipendenza del livello del lobo laterale dal coefficiente di asimmetria è mostrata in Fig. 10
Il coefficiente di asimmetria è stato determinato come
, (16)
dove è la durata della formazione dell'impulso elementare non distorto M- sotto sequenza; gli indici “+” e “-” indicano la durata dell'impulso elementare positivo e negativo con distorsioni asimmetriche.
Figura 10. Dipendenza del livello del lobo laterale ACF dall'entità delle distorsioni asimmetriche del segnale per K=4.
Conclusione.
La scelta del segnale e il grado di complessità della sua funzione di modulazione sono determinati principalmente dalla natura dei compiti a cui è destinato il radar. L'utilizzo di un segnale FCM abbastanza complesso con modulazione intrapulse richiede la creazione di apparecchiature di precisione, che porteranno inevitabilmente ad un aumento significativo del prezzo del progetto, ma allo stesso tempo consentiranno di creare unità universali che possono essere utilizzate sia nei radar per i soccorritori che nei radar per il rilevamento di aerei in volo veloce. Questa possibilità nasce perché le caratteristiche di un segnale complesso con una breve lunghezza di sequenza, ad es. l'elevata frequenza di ripetizione dell'invio, consentono di avere la necessaria risoluzione e immunità al rumore con la possibilità di misurare le frequenze Doppler in un intervallo più ampio. Inoltre, la costruzione di sistemi radar con radiazione continua e modulazione di fase pseudo-casuale dell'onda portante richiede un'analisi dettagliata e la considerazione di tutti i fattori che causano la distorsione del segnale sia nel percorso di trasmissione che in quello di ricezione del localizzatore. La presa in considerazione dei fattori di distorsione si riduce alla risoluzione dei problemi ingegneristici per garantire una banda larga sufficiente, la stabilità dei parametri elettrici e la stabilità delle caratteristiche dei percorsi di formazione. In questo caso i segnali della sonda radar devono essere coerenti con i segnali modulanti ed ausiliari. Altrimenti sono necessarie soluzioni tecniche che minimizzino le distorsioni differenziali tra le oscillazioni irradiate e quelle di riferimento. Uno dei modi possibili per implementare tali soluzioni tecniche è introdurre limitazioni simmetriche di ampiezza dei segnali negli stadi di uscita del trasmettitore e all'ingresso del correlatore del ricevitore. In questo caso, pur perdendo parte dell'energia del segnale, è possibile formare un ACF del segnale modulato con parametri accettabili. Tali soluzioni tecniche sono accettabili nei radar portatili, dove il costo e le dimensioni del sistema giocano un ruolo decisivo.
La più promettente al momento, dal punto di vista degli autori, dovrebbe essere considerata la costruzione di dispositivi per la generazione e l'elaborazione di segnali radio di struttura complessa per apparecchiature radar, basati su processori di segnale ad alta velocità che operano a frequenze di clock di diversi gigahertz. Lo schema strutturale del radar con questo approccio diventa estremamente semplice. Si tratta di un amplificatore di potenza lineare, un amplificatore ricevitore lineare a basso rumore e un processore con dispositivi periferici. Questo schema consente non solo di realizzare quasi completamente le proprietà dei segnali inerenti alla loro struttura fine, ma anche di creare sistemi radar tecnologicamente facili da configurare, la cui elaborazione delle informazioni si basa su algoritmi ottimali.
Letteratura
1. Frank U.A., Kratzer D.L., Sullivan J.L. Il radar Twopound // RCA Eng.- 1967. N. 2; P.52-54.
2. Radar Doppler per la ricognizione a terra. Ser. Tecnologia. significa intelligenza limite servizi. stato //VINITI. – 1997. – N. 10. – P. 46-47.
3. NordwallBruce D.Il radar a banda ultralarga rileva le mine sepolte // Aviat. Settimana e tecnologia spaziale- 1997. N. 13.-P. 63-64.
4. Sytnik O.V., Vyazmitinov I.A., Myroshnychenko Y.I. Le caratteristiche degli sviluppi radar per il rilevamento di persone sotto ostacoli // Telecomunicazioni e ingegneria radio.¾ 2004. ¾. Stima dell'effetto degli errori di implementazione sulle caratteristiche del segnale radar pseudocasuale // Telecomunicazioni e ingegneria radio.¾ 2003. ¾ Vol.60, n. 1 e 2. ¾ P. 132–140.
9. Manuale del radar / Ed. M. Skolnik. Per. dall'inglese Ed. KN Trofimova. , M.: Sov. radio, 1978, vol.3. 528.






I segnali a scaffale ampio includono anche segnali con frequenza di modulazione lineare intra-impulso (chirp). Può essere presentato sotto forma
dove φ(t) è la fase totale.
La frequenza all'interno dell'impulso cambia secondo la seguente legge
![]() ,
,
dove Δf è la deviazione di frequenza.
La fase totale al tempo t si ottiene integrando la frequenza:

Pertanto, la fase totale del segnale cambia secondo una legge quadratica. Tenendo conto dell'intera fase del chirp, il segnale può essere scritto nella seguente forma
Base del segnale ![]() . L'aspetto del segnale chirp è mostrato in Fig. 4.179.
. L'aspetto del segnale chirp è mostrato in Fig. 4.179.
L'elaborazione ottimale di un segnale chirp richiede la presenza di un filtro adattato con caratteristica speculare rispetto al segnale. Tra i filtri analogici, questa è una linea di ritardo dispersiva, il cui tempo di ritardo dipende dalla frequenza.
Uno schema semplificato di un filtro adattato per un segnale chirp è mostrato in Fig. 4.180.

Troviamo lo spettro del segnale all'uscita del filtro abbinato usando la formula
dove K(jω) è la funzione di trasferimento del filtro adattato;
S(jω) – spettro del segnale chirp esterno.
L'aspetto dello spettro S(jω) è mostrato in Fig. 4.181

dov'è il momento in cui appare il segnale di uscita massimo;
K è una costante.
Lasciando il modulo della densità spettrale uguale ad un valore costante, otteniamo

dove B è l'ampiezza delle componenti spettrali.
Secondo il teorema di Parseval
Troveremo il segnale all'uscita del filtro adattato nel dominio del tempo utilizzando la trasformata di Fourier del piano spettrale

Integrando sulle frequenze positive ed isolando la parte attiva, otteniamo
Pertanto, l'impulso di uscita è diventato K volte più stretto dell'impulso di ingresso e la sua ampiezza è aumentata di un fattore.
L'aspetto dell'impulso è mostrato in Fig. 4.172

La larghezza del lobo principale agli zeri è 2/Δf, e al livello 0,64-1/Δf. Il rapporto di compressione a questo livello sarà uguale a
Il diagramma di incertezza del segnale chirp è mostrato in Fig. 4.183.
Con la banda di frequenza occupata, il chirp è il segnale migliore per la risoluzione temporale.
Il meccanismo di compressione del segnale nel filtro ottimale può essere spiegato come segue. Il filtro ottimale ritarda le componenti spettrali per un certo periodo:
![]() (4.104)
(4.104)
dov'è la frequenza media;
Deviazione di frequenza;
Durata dell'impulso;
Tempo per raggiungere il massimo dell'impulso compresso.
La dipendenza del tempo di ritardo dalla frequenza (4.104) è mostrata in Fig. 4.184. Il tempo di ritardo è una funzione linearmente decrescente della frequenza. La dipendenza del tempo di ritardo dalla frequenza è chiamata dispersione.

Al tempo t la frequenza istantanea del segnale all'ingresso del filtro è pari a . L'oscillazione di questa frequenza arriva all'uscita del filtro con un ritardo di , cioè nel momento . Definiamo questo momento:
Di conseguenza, tutte le componenti spettrali del segnale (indipendentemente dalla loro frequenza) vengono ritardate nel filtro per un tempo tale da arrivare simultaneamente alla sua uscita all'istante . Come risultato dell'addizione aritmetica, si forma un picco del segnale (Fig. 4.185).

La forma dell'impulso radio compresso in assenza di disadattamento di frequenza è determinata dallo spettro di ampiezza-frequenza del segnale di ingresso. Lo spettro di fase-frequenza, in questo caso, è compensato dalla risposta di fase-frequenza del filtro e non influenza la forma del segnale di ingresso. La ragione principale è la compensazione dello spettro di fase-frequenza del segnale
compressione temporale, portando ad una sovrapposizione coordinata di componenti armoniche.
Elaborazione del segnale FCM
Un segnale manipolato con codice di fase è un segnale di impulso diviso in impulsi paralleli, ciascuno dei quali ha la propria fase iniziale (Fig. 4.186)

Per un tale segnale vale la relazione
dove N è il numero di impulsi parziali nel segnale;
Δf – larghezza dello spettro del segnale.
I codici di fase sono generalmente binari, ma possono essere più complessi. Il segnale FCM può essere rappresentato come un treno di impulsi coerenti. Per un pacchetto di questo tipo, il rilevatore ottimale è mostrato in Fig. 4.187
Le caratteristiche dello schema sono le seguenti:
· Ritardo tra derivazioni di linea adiacenti, i ritardi devono essere pari alla durata dell'impulso parziale τ 1 ;
· Alcune derivazioni della linea di ritardo devono includere sfasatori che forniscono la somma dei segnali in modo comune.
Lo schema a blocchi del rilevatore di segnale PCM ottimale è mostrato in Fig. 4.188

Lo schema mostra: PV – sfasatori; SF – filtro abbinato. Le Figure 4.189 e 4.190 mostrano i circuiti del rilevatore ottimale e i diagrammi di tensione per un segnale costituito da tre impulsi parziali.

Uno dei parametri principali che caratterizzano un sistema radar è il coefficiente di discernibilità, che è definito come il rapporto tra la potenza minima del segnale all'ingresso del ricevitore P min e la potenza del rumore
Le prestazioni di rilevamento dipendono dall'energia del segnale