FCM تقسیم پالس رادیویی اصلی به n قسمت با مدت زمان مساوی و در تماس با یکدیگر است. در این حالت، قطعات مجاور را می توان در فاز جابجا کرد. پرکاربردترین سیستم یک سیستم ضد فاز است که در آن افست 0 یا 0 است.
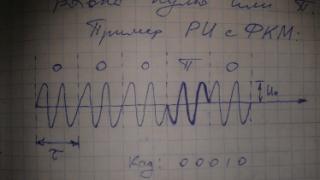
مثالی از RI با FCM:

برنج. کد 00010
گیرنده RI با FCM.
برنج. طرح ساختاری

LZ - خط تاخیر، PV - شیفتر فاز، RI - پالس رادیویی.
ویژگی اصلی گیرنده در نظر گرفته شده این است که قسمت مرکزی پالس رادیویی خروجی n برابر (n=5) کوتاهتر از مدت زمان پالس رادیویی ورودی است. بنابراین، RF با FCM، و همچنین RF با RFM، برای تمایز بین اهداف نزدیک استفاده می شود.
بیایید سوال زیر را در نظر بگیریم: چه کدهایی امکان ایجاد گیرنده ای را فراهم می کند که در آن پالس رادیویی مرکزی دارای دامنه n برابر بیشتر از دامنه پالس های رادیویی جانبی باشد (زیرا فقط در این مورد می توان در مورد باریک شدن کاوشگر صحبت کرد. پالس رادیویی n بار در ورودی گیرنده رادیویی).
RF با FCM با داشتن این خاصیت کدهایی دارند که فراخوانی می شوند کدهای بارکر. چند کد بارکر شناخته شده است؟ امروزه کدهایی با اعداد تا n = 13 شناخته شده اند:
|
کدهای بارکر |
|
خودتان یک بلوک دیاگرام برای n=7 بکشید.
تولید RF با FCM.

تأثیر تداخل غیرفعال بر تشخیص سیگنال رادار.
تداخل غیرفعال تداخلی است که در نتیجه انعکاس سیگنال های کاوشگر از اجسامی که هدف نیستند رخ می دهد. می تواند منشأ طبیعی (ابر، برف) یا مصنوعی (بازتابنده های پوشاننده) داشته باشد.
پیش نیاز فیزیکی برای جداسازی سیگنال های منعکس شده از یک هدف سریع (هواپیما) و یک مانع کند حرکت (ابرها) تغییر داپلر سیگنال است. به عنوان مثال: km/h -Hz، km/h -Hz (تغییر نسبت به فرکانس).
فیلتر بهینه برای نویز "غیر سفید".
بگذارید چگالی طیفی توان نویز یا تداخل غیر سفید با وابستگی مشخص شود. ما از تبدیل این وابستگی به وابستگی استفاده می کنیم که دیگر وابستگی فرکانسی ندارد، یعنی همان نویز سفید. چنین مبدلی نامیده می شود فیلتر سفید کننده. اجازه دهید پاسخ فرکانسی چنین فیلتری باشد. سپس باید باشد. این انتخاب با عبارت قدرت کل نویز تعیین می شود. بنابراین، بر خلاف نویز سفید، عبارت انتگرال به فرکانس بستگی ندارد. حدود واقعی ادغام محدود است. در نتیجه، طیف نویز سفید شده میتواند متعاقباً به همان روشی که در مورد نویز سفید وجود دارد تبدیل شود، یعنی میتوان از OFهای توسعهیافته قبلی استفاده کرد.
بلوک دیاگرام گیرنده تداخل غیرفعال بهینه به صورت زیر خواهد بود:

نسبت انتقال کل دستگاه خواهد بود
بیان افزایش فرکانس فیلتر بهینه برای تداخل "غیر سفید".
در مورد خاص استفاده از نویز سفید.
تحلیل گرافیکی ضریب انتقال.
برنج. 
گیرنده بهینه پالس های رادیویی
طیف یک دنباله تناوبی از پالس های رادیویی خطی است و پارامترهای مشخصه در شکل نشان داده شده است.
برنج. طیف برای یک دنباله بی نهایت ().


اگر دنباله حاوی m پالس و m> 1 باشد، هر خط از طیف گسترده می شود.
به دلیل اثر داپلر، طیف تداخل نسبت به طیف سیگنال از هدف جابجا می شود، به طوری که اجزای فرکانس یک طیف در فاصله بین اجزای فرکانس طیف دیگر قرار می گیرند (شکل را ببینید). .
برنج. 
از شکل مشخص می شود که تداخل را می توان با استفاده از یک فیلتر چند باندی حذف کرد، که در آن باندهای عبور به همان ترتیب باندهای طیف هدف قرار دارند و باندهای جذبی مانند باندهای طیف تداخلی قرار دارند. چنین فیلتری فیلتر رد شانه (CRF) نامیده می شود.

در حال حاضر باقی مانده است مربوطدر رادار، وظیفه تفکیک پذیری و در سیستم های انتقال اطلاعات، تشخیص سیگنال ها است.
برای حل این مشکلات، می توان از سیگنال های FCM کدگذاری شده توسط مجموعه هایی از توابع متعامد استفاده کرد، که، همانطور که مشخص است، همبستگی متقاطع صفر دارند.
برای تشخیص سیگنال ها در رادار، می توانید از سیگنال انفجاری استفاده کنید که هر پالس آن توسط یکی از ردیف های یک ماتریس متعامد، به عنوان مثال، ماتریس Vilenkin-Chrestenson یا Walsh-Hadamard کدگذاری می شود. این سیگنال ها دارای ویژگی های همبستگی خوبی هستند که امکان استفاده از آنها را برای کارهای فوق الذکر فراهم می کند. برای تمایز بین سیگنال ها در سیستم های انتقال داده، می توانید از همان سیگنال با چرخه کاری برابر با یک استفاده کنید.
ماتریس Vilenkin-Chrestenson را می توان برای تشکیل چند فاز استفاده کرد. پفاز) سیگنال FCM، و ماتریس والش هادامارد، به عنوان یک مورد خاص از ماتریس Vilenkin-Chrestenson برای تعداد فازهای برابر با دو، برای تشکیل یک سیگنال دو فازی.
سیگنالهای چند فازی دارای ایمنی بالای نویز، رازداری ساختاری و سطح نسبتاً پایینی از لوبهای جانبی تابع همبستگی هستند. اما برای پردازش این گونه سیگنال ها به دلیل وجود قسمت های واقعی و خیالی از نمونه های سیگنال، نیاز به صرف تعداد بیشتری از عملیات جمع و ضرب جبری است که منجر به افزایش زمان پردازش می شود.
چالشهای تبعیض و تفکیک را میتوان با تغییر ناشناخته داپلر پیشینی فرکانس حامل به دلیل حرکت نسبی منبع و مشترک یا رادار و هدف تشدید کرد، که همچنین پردازش سیگنال بلادرنگ را به دلیل وجود کانالهای پردازش داپلر اضافی پیچیده میکند. .
برای پردازش سیگنالهای فوقالذکر با فرکانس داپلر، پیشنهاد میشود از دستگاهی استفاده شود که شامل یک ثبت ورودی، یک پردازنده تبدیل گسسته، یک واحد اتصال متقابل و مجموعهای از واحدهای تولید سیگنال ACF یکسان است که به صورت متوالی هستند. شیفت رجیسترهای متصل
اگر ماتریس متعامد Vilenkin-Chrestenson را به عنوان ماتریس پایه برای پردازش سیگنال انفجار چند فاز در نظر بگیریم، آنگاه تبدیل گسسته به تبدیل گسسته Vilenkin-Chrestenson-Fourier تبدیل می شود.
زیرا از آنجایی که ماتریس Vilenkin-Chrestenson را می توان با استفاده از الگوریتم گود فاکتورسازی کرد، تبدیل گسسته Vilenkin-Chrestenson-Fourier را می توان به تبدیل سریع Vilenkin-Chrestenson-Fourier کاهش داد.
اگر ماتریس متعامد والش-هادامارد را به عنوان ماتریس پایه در نظر بگیریم - یک مورد خاص از ماتریس Vilenkin-Chrestenson برای پردازش سیگنال انفجاری دو فازی، آنگاه تبدیل گسسته به تبدیل گسسته والش-فوریه تبدیل می شود که با فاکتورسازی می توان آن را کاهش داد. به تبدیل سریع والش فوریه.
سیگنال های پیچیده یا پرقدرت نیازهای متناقض را برای افزایش دامنه تشخیص و وضوح حل می کنند. محدوده تشخیص در هنگام استفاده از سیگنالهای کاوشگر پرانرژی افزایش مییابد. افزایش با افزایش قدرت یا مدت زمان سیگنال امکانپذیر است. اوج قدرت در یک رادار از بالا به دلیل قابلیت های مولد فرکانس رادیویی و به ویژه قدرت الکتریکی خطوط تغذیه که این ژنراتور را به آنتن متصل می کند، محدود می شود. هنگام استفاده از آرایه های فازی، اوج توان توسط حداکثر توان ماژول های آرایه فازی محدود می شود. بنابراین، با افزایش مدت زمان سیگنال، افزایش آن آسان تر است. با این حال، سیگنال های طولانی مدت وضوح محدوده خوبی ندارند. سیگنال های پیچیده با پایه بزرگ می توانند این تناقضات را حل کنند. در حال حاضر، دو نوع سیگنال پیچیده به طور گسترده مورد استفاده قرار می گیرند: مدوله شده با فرکانس خطی (چیپ) و کدگذاری گسسته (DCS).
سیگنال مدوله شده فرکانس خطیاگر در طول مدت پالس، فرکانس حامل بر اساس یک قانون خطی با انحراف فرکانس زیاد مدوله شود، پایه سیگنال بزرگ خواهد بود و پوشش چگالی طیفی سیگنال ورودی به مستطیل نزدیک می شود، یعنی. سپس، در خروجی فیلتر بهینه، یک پاکت سیگنال از فرم
![]()
چگالی طیفی سیگنال در خروجی فیلتر بهینه با ضریب انتقال کجاست
با تبدیل فوریه در عرض طیف Aeos، سیگنال خروجی را پیدا می کنیم:
![]()
با ساختن جایگزین بدست می آوریم
مشاهده می شود که پالس در خروجی فیلتر بهینه دارای پوششی از فرم است

تاخیر سیگنال در فیلتر کجاست
مدت زمان پالس خروجی در سطح 0.637 است بنابراین، پالس توسط یک عامل کوتاه یا فشرده می شود. نسبت تراکم برابر با پایه سیگنال است.
مثال. بیایید یک نمودار زمانی از یک پالس رادیویی مستطیلی با مدولاسیون فرکانس خطی درون پالسی بسازیم. پارامترهای سیگنال: دامنه فرکانس متوسط طول مدت سیگنال عرض طیف

برنج. 4.10. نوع سیگنال چیپ
راه حل. عبارت تحلیلی برای سیگنال (شکل 4.10) شکل دارد

نسبت تراکم (پایه سیگنال) کجاست.

برنج. 4.11. فرآیند "فشرده سازی" صدای جیر جیر - پالس رادیویی: a - پاکت سیگنال ورودی. ب - قانون چیرپ؛ ج - پاکت سیگنال خروجی
در شکل شکل 4.11 نمودارهایی را نشان می دهد که فرآیند فشرده سازی یک پالس رادیویی با صدای جیر جیر را نشان می دهد.
سیگنال دارای پارامترهای زیر است:

فیلترهای فشرده سازیدستگاه هایی با ویژگی های دامنه فرکانس مستطیلی و فرکانس فاز درجه دوم می توانند به عنوان فیلترهای فشرده سازی استفاده شوند، به عنوان مثال، خطوط تاخیر (DL) یک سیگنال با ضربه ها (شکل 4.12، a، b). اگر LP خاصیت پراکندگی نداشته باشد، شیرها به طور ناهموار در فواصل تأخیر متفاوت قرار می گیرند و در نتیجه از جمع فاز سیگنال ها هنگامی که پالس چیپ در امتداد LP منتشر می شود، اطمینان حاصل می کنند. اگر از یک LP پراکنده استفاده شود، که در آن نرخ تغییر زمان تاخیر گروه از فرکانس بر خلاف نرخ تغییر فرکانس سیگنال چیپ در طول زمان باشد، شیرها به طور مساوی در امتداد LP قرار می گیرند.

برنج. 4.12. خط تاخیر غیر پراکنده (الف) و خط تاخیر پراکندگی (ب)

برنج. 4.13. خط تاخیری پراکنده اولتراسونیک بر اساس سورفکتانت ها
برای فشردهسازی پالسهای رادیویی چیپ، رایجترین مورد استفاده، خطوط تأخیر اولتراسونیک پراکنده (DULZ) بر روی امواج صوتی سطحی (SAW) است که صفحات نازکی از مواد پیزوالکتریک (کوارتز پیزوالکتریک مصنوعی، نیوبات لیتیوم، ژرمنات بیسموت و غیره) هستند که روی آنها وجود دارد. شبکه های فلزی انتقال دهنده و گیرنده استفاده می شود.الکترودها (شکل 4.13).
پارامترهای اصلی لنز شامل فرکانس کاری، پهنای باند و زمان تاخیر است که مقادیر آن به مواد لنز بستگی دارد.
به عنوان مثال، یک DULZ (JSC Avangard) را در نظر بگیرید، طراحی شده برای فشرده سازی یک پالس رادیویی چیپ با مدت زمان با انحراف فرکانس، که در یک فرکانس کار می کند.
فیلتر روی چنین لیزری تلفات ایجاد می کند و دارای سطحی از لوب های جانبی است.تعداد الکترودها در شبکه مبدل برابر است با .
پالس فشرده شکلی دارد که خطر پوشاندن لوب های اصلی پالس رادیویی فشرده را که از یک هدف با RCS پایین منعکس می شود (شکل 4.14) توسط لوب های جانبی سیگنال قوی افزایش می دهد. برای مبارزه با این پدیده، پردازش وزن سیگنال ها در حوزه زمان یا فرکانس با استفاده از فیلترهای تصحیح ویژه (شکل 4.15) که معمولاً بر اساس یک طرح عرضی ساخته می شوند، استفاده می شود.

برنج. 4.14. پوشاندن یک سیگنال ضعیف (هدف 2) با لوب جانبی یک سیگنال قوی (هدف

برنج. 4.15. مدارهای وزن دهی برای پردازش سیگنال های چیپ در حوزه زمان و فرکانس
تقویت کننده ها در شیرهای فیلترهای فشرده سازی عرضی نصب می شوند که ضرایب انتقال آنها با ضرایب وزن تابع تصحیح مطابقت دارد. در DULZ مبتنی بر سورفکتانت، ضرایب وزنی مورد نیاز با تغییر طول الکترودهای آرایه به دست می آید.
پردازش وزنی را می توان با استفاده از توابع وزن دهی فیلتر تصحیح زیر اجرا کرد:
1) تابع وزن Dolf-Chebyshev (شکل 4.16).
2) تابع وزن تیلور؛
3) عملکرد وزن کلی:

یک مورد خاص از تابع وزن تیلور، تابع وزن همینگ است:
بلوک دیاگرام فیلتر c در شکل نشان داده شده است. 4.17 فیلتر سرکوب به صورت دو خط تاخیر که به صورت سری به سه تقویت کننده وزن و یک جمع کننده متصل شده اند اجرا می شود. با این پردازش، سطح لوب های جانبی کاهش می یابد اما، لوب اصلی تقریباً 1.47 برابر منبسط می شود و نسبت سیگنال به نویز در قدرت 1.34 برابر نسبت سیگنال به نویز در ورودی کاهش می یابد. فیلتر همینگ
سطح لوب های جانبی به نسبت معکوس زمان برای همه انواع پردازش وزن کاهش می یابد، به جز برای تابع وزن Dolph-Chebyshev که بدون تغییر است. در این حالت، لوب اصلی تا حدودی منبسط می شود و تلفات انرژی نسبت به پردازش بهینه (بدون فیلتر اصلاح) افزایش می یابد. علاوه بر فیلترهای اصلاحی، برای مبارزه با لوب های جانبی، از تغییر شکل (پیش تاکید) سیگنال های کاوشگر و مدولاسیون فرکانس غیرخطی درون پالس استفاده می کنند.

برنج. 4.16. پاسخ فرکانسی فیلتر اصلاحی Dolph-Chebyshev

برنج. 4.17. دیاگرام بلوک فیلتر همینگ
سیگنال های رمزگذاری شده گسسته (DCS)اجازه دهید مدلی از یک بدنه عدم قطعیت را تصور کنیم که الزامات یک سیگنال کاوشگر پر انرژی با وضوح بالا را به طور همزمان در زمان و فرکانس برآورده می کند (محدوده و سرعت به شکل یک پایه ضخامت و یک مخروط تیز با محوری منطبق با
با یک محور به ارتفاع 1 و یک پایه بیضوی که روی یک پایه ایستاده است (شکل 4.18).
اجازه دهید بدنه FNSS را به دو بخش تقسیم کنیم: آموزنده و غیر آموزنده و
![]()
بگذارید طول مدت، عرض طیف سیگنال باشد، سپس مطابق شکل 1. 4.19 حجم اطلاعاتی حجم قله اصلی (نوک) و حجم غیر اطلاعاتی نمایانگر یک پایه-موازی با حجم است.برای این امر لازم است که i.e. مقدار باید کوچکتر باشد، منطقه ای که حجم در آن "توزیع" بزرگتر است
همانطور که می بینید، برای انجام این شرط، سیگنال باید هم طولانی مدت و هم پهن باند باشد، یعنی. سیگنال های پیچیده را با یک پایه بزرگ درمان کنید. دومی می تواند سیگنال های نویز مانند (NL) و اغلب سیگنال های کدگذاری گسسته (DCS) باشد.

برنج. 4.18. مدل تابع عدم قطعیت یک سیگنال پیچیده
رمزگذاری گسسته سیگنال ها را می توان با فاز، فرکانس و دامنه، به طور جداگانه یا همزمان انجام داد. به طور معمول، DCS به کدگذاری شده با دامنه (ADKS)، فرکانس (PDKS) و فاز (FDKS) تقسیم می شود. یک سیگنال کد گسسته، یک پالس رادیویی با مدت زمان متشکل از عناصر پالس کوتاهتر (گسسته) با مدت زمان tk، نزدیک به یکدیگر است (به شکل 4.20، a مراجعه کنید). به صورت تحلیلی، DCS را می توان به صورت زیر نوشت:

پارامترهای مدولاسیون کد دنباله ای از گسسته ها که ممکن است حاوی کدها باشند، تعداد توالی کد گسسته، تعداد گسسته ها در سیگنال، کجا هستند. ضربه دامنه استاندارد با مدت زمان tk (مدت عنصر کد):

در این حالت، مدت زمان سیگنال برابر است با از آنجایی که - یک پارامتر انرژی است، برای حفظ انرژی سیگنال در طول محاسبات، لازم است که (4.17) با استفاده از یک مقسومکننده اضافی عادی شود. از عبارت کلی (4.17) فرمولهایی را دنبال کنید که DCS را توصیف میکنند. با انواع مختلف کدنویسی هنگامی که یک سیگنال با کد دامنه (ADKS) داریم:

O برای مقادیر دیگر
زمانی که سیگنالی با کد فرکانس (FCS) دریافت می کنیم. اجازه دهید پس از آن نشان می دهد

O برای مقادیر دیگر
بیشتر از سایرین، سیگنال های FDCS یا به اصطلاح سیگنال های مدوله شده با کد فاز (PCM) و دستکاری فاز (PM) استفاده می شود. در این مورد و

به تعداد مقادیری که فازهای اولیه عناصر کد می گیرند، پایه دنباله کد می گویند. وقتی یک دنباله باینری داریم.
یک دنباله FCM باینری زمانی به دست می آید که فاز اولیه عنصر یکی از دو مقدار یا . سپس کد را می توان به عنوان دنباله ای از مقادیر فاز مشخص کرد
یا به عنوان دنباله ای از عبارات یا به عنوان دنباله ای از کاراکترهای کد
گاهی در مطالب گویا به جای نمادها از نمادهای مربوطه استفاده می شود
بنابراین، تشکیل یک دنباله کد باینری به تعیین مقادیر گسسته کاهش می یابد

منطق نمادها با این قانون تعیین می شود:
در شکل شکل 4.19 نمای یک پالس سیگنال-رادیویی (a) با تغییر فاز باینری (PM) و دنباله کد مربوطه را نشان می دهد.کدهای بارکر و توالی های باینری اغلب به عنوان دنباله کد باینری سیگنال های کلید شده با تغییر فاز استفاده می شوند. کدهای بارکر سطوح لوب جانبی را برابر با i.e.

فرآیند پردازش بهینه و فشرده سازی زمانی یک پالس با PCM درون پالس با استفاده از کد هفت رقمی بارکر در شکل نشان داده شده است. 4.19.
فشرده سازی پالس FCM با استفاده از یک خط تاخیر (DL) با شیرها و یک جمع کننده انجام می شود، سیگنال هایی که از LZ به طور مستقیم یا با چرخش فاز توسط شیرها به آنها ارسال می شود. برعکس، برای اطمینان از توالی مجموع گسسته های نشان داده شده در شکل. 4.19، g. علاوه بر این، روند جمع با استفاده از یک دنباله کد نشان داده شده است؛ بنابراین، فاز اولیه مطابق و فاز مطابق است. قانون تغییر علائم از اولین ضربه به آخرین (از ابتدای LZ تا انتها) معکوس است. به کد C، مراحل اولیه پالس رادیویی (کد در شکل 4.19، d). این کد یک تصویر آینه ای از کد پایه باند است و نشان دهنده پاسخ ضربه ای فیلتر بهینه است. تغییر در فاز سیگنال های جزئی در هر یک از شیرهای LZ هنگام عبور سیگنال رادیویی از آن در شکل نشان داده شده است. 4.19، g.
برنج. 4.19. (نگاه کنید به اسکن) پردازش یک پالس رادیویی FCM با کد بارکر هفت عنصری در یک فیلتر بهینه: a - نوع پالس رادیویی FCM. ب - کد باینری فازهای اولیه گسسته؛ ج - بلوک دیاگرام دستگاه پردازش (فیلتر بهینه)؛ r - دنباله ای از جمع گسسته ها. د - نتیجه جمع گسسته ها. e - سیگنال خروجی
مشاهده می شود که وقتی شروع پالس رادیویی به آخرین ضربه می رسد و به پایان می رسد - اولین سیگنال های جزئی در هر هفت ضربه
علامت (فاز) و مجموع در فاز یکسان خواهد داشت. خروجی حداکثر سیگنال ممکن را تولید می کند - پیک اصلی با مدت زمان. در سمت راست و چپ این پیک سه لوب جانبی با دامنه وجود دارد. فیلتر با یک پالس PCM با مدت زمان مطابقت دارد و برای افزایش خروجی کار می کند. از فیلتر بهینه با این حال، کدهای بارکر فقط برای آن شناخته می شوند
با یک کد سیزده رقمی بارکر، پالس را می توان حداکثر تا 13 بار فشرده کرد و حداقل سطح لوب های جانبی DCF 1/13 دامنه پیک اصلی سیگنال خروجی فیلتر بهینه خواهد بود. در شکل شکل 4.20 FNSS یک سیگنال را با کلید زدن کد فاز توسط کد Barker نشان می دهد.

برنج. 4.20. نمای FNSS با مدولاسیون فاز توسط کد بارکر
بنابراین برای افزایش نسبت تراکم، برای بهبود وضوح هدف در برد و سرعت، و همچنین برای کاهش سطح لوبهای جانبی، از توالیهای کد بازگشتی خطی استفاده میشود که عملاً هیچ محدودیتی در طول مدت کد ندارند.
بهعنوان دنبالههای کد مکرر، اغلب از دنبالههای - یا کدهایی با حداکثر طول استفاده میشود که با استفاده از روابط بازگشتی تشکیل میشوند، که به آنها اجازه میدهد تا روی ثباتهای شیفت پوشش داده شده توسط اتصالات بازخورد تشکیل شوند. دنباله ها به دوره ای تقسیم می شوند، زمانی که دوره تکرار کد برابر با مدت زمان آن است، و غیر تناوبی (قطع شده)، زمانی که بیشتر باشد. اغلب، یک دنباله به عنوان دنباله ای از کاراکترها مشخص می شود.
برای ریشه 2، مقدار کاراکتر فعلی دنباله کد به کاراکترهای قبلی بستگی دارد و با فرمول محاسبه می شود.

جایی که می تواند برابر یا 1 باشد.
این مقدار حافظه توالی کد نامیده میشود و تعداد سلولهای موجود در رجیستر شیفت را که کد را تشکیل میدهند، تعیین میکند. در
هنگام تشکیل یک دنباله کد، یک بلوک اولیه دلخواه یا ترکیبی اولیه از نمادهای کد، متشکل از نمادها، مشخص می شود. کل توالی با استفاده از رابطه عود (4.21) به دست می آید.
اجازه دهید برخی از ویژگی های اصلی - sequences را فهرست کنیم:
1) - دنباله ها حاوی عناصر هستند و مدت زمان دارند.
2) مجموع دو - دنباله مدول 2 در نمادها دوباره یک - دنباله می دهد.
3) سطح لوب های جانبی DCF برای یک دنباله تناوبی با پریود برابر است و برای یک توالی غیر تناوبی منفرد (قطع شده) مدت زمان برابر است با
4) تعداد توالی های مختلف خطی تکرار شونده حداکثر با یکسان توسط الگوریتمی که تابع اویلر است تعیین می شود.
برای تشکیل یک دنباله کدگذاری (تعدیلکننده)، معمولاً از ثباتهای شیفت استفاده میشود که طبق قوانین خاصی با بازخورد از شیرهای ثبت پوشش داده میشوند. قوانین اجرای اتصالات بازخورد در ثبات هایی که یک کد را بر اساس دنباله های خطی تکرارشونده با حداکثر طول تشکیل می دهند، می توانند با استفاده از به اصطلاح چند جمله ای های مشخصه دنباله های کد تعیین شوند.
UDC 621.396.96:621.391.26
روشی برای افزایش کارایی رادار برای شناسایی افراد در پشت موانع نوری مات
O. V. Sytnik I. A. Vyazmitinov، E. I. Miroshnichenko، Yu. A. Kopylov
موسسه رادیوفیزیک و الکترونیک به نام. A. Ya. Usikova NAS اوکراین
احتمالات کاهش سطح لوب های جانبی تابع همبستگی خودکار سیگنال های کاوشگر FCM و مشکلات اجرای عملی آنها در تجهیزات در نظر گرفته شده است. یک مدولاسیون درون پالس دامنه فاز بهینه پیشنهاد شده است که کاهش لوب های جانبی و در عین حال افزایش نرخ تکرار پیام های کاوشگر را ممکن می سازد. عوامل مؤثر بر ویژگیهای چنین سیگنالهایی مورد مطالعه قرار گرفته و معیاری برای امکانسنجی آنها در تجهیزات پیشنهاد شده است.
معرفی.
الگوریتمهای پردازش سیگنال در یک رادار با سیگنال کاوشگر شبه پیوسته که برای شناسایی اشیاء پنهان در پشت موانع نوری مات طراحی شدهاند، معمولاً بر اساس اصل پردازش همبستگی بهینه یا فیلتر همسان [-] ساخته میشوند.
سیگنال های کاوشگر برای چنین رادارهایی بر اساس نیاز برای اطمینان از وضوح لازم و ایمنی نویز انتخاب می شوند. در این مورد، آنها سعی می کنند تابع عدم قطعیت سیگنال را به شکل مدادی در صفحه مربوطه با حداقل سطح لوب های جانبی درآورند. برای این کار، انواع پیچیده مدولاسیون [،،] استفاده می شود. رایج ترین آنها عبارتند از: سیگنال های مدوله شده با فرکانس. سیگنال های چند فرکانس؛ سیگنال های کلیدی تغییر فاز؛ سیگنال با مدولاسیون فاز کد. سیگنال های فرکانس گسسته یا سیگنال هایی با مدولاسیون فرکانس کد؛ سیگنال های ترکیبی با مدولاسیون فرکانس کد و تعدادی سیگنال که ترکیبی از چندین نوع مدولاسیون هستند. هرچه اوج اصلی تابع عدم قطعیت سیگنال باریک تر باشد و سطح لوب های جانبی آن کمتر باشد، به همان نسبت وضوح و مصونیت نویز رادار بالاتر است. اصطلاح "ایمنی نویز" در این اثر به معنای مقاومت رادار در برابر تداخل ناشی از انعکاس سیگنال کاوشگر از اجسامی است که هدف نیستند و در خارج از بارق تحلیل شده قرار دارند (فرکانس، زمان). چنین سیگنال هایی در ادبیات، سیگنال های خط پایه بلند یا سیگنال های باند فوق العاده (UWB) نامیده می شوند.
یکی از انواع سیگنالهای UWB، سیگنالهای کلیددار فاز هستند که نشاندهنده دنباله کدگذاری شده از پالسهای رادیویی هستند که فازهای اولیه آن بر اساس قانون معین متفاوت است. توالی کد حداکثر طول یا م-توالی ها برای رادار خواص بسیار مهمی دارند:
· م- توالی ها با نقطه تناوبی هستند، که در آن تعداد پالس های ابتدایی در دنباله است. - مدت زمان یک پالس ابتدایی؛
· سطح لوب های جانبی تابع عدم قطعیت برای یک دنباله تناوبی - و برای یک دنباله منفرد از پالس ها - است.
· پالس ها در یک دوره از دنباله، که در فازها، فرکانس ها، مدت زمان متفاوت هستند، با احتمال مساوی توزیع می شوند، که زمینه را برای در نظر گرفتن این سیگنال ها به عنوان شبه تصادفی فراهم می کند.
· تشکیل م- توالی ها به سادگی بر روی ثبات های شیفت انجام می شوند و تعداد بیت های رجیستر با طول یک دوره از دنباله - از رابطه تعیین می شود.
هدف از این کار بررسی احتمالات کاهش سطح لوب های جانبی تابع عدم قطعیت سیگنال های مدوله شده است. م-سکانس ها
فرمول بندی مسئله.
شکل 1 قطعه ای از یک تابع تعدیل کننده را نشان می دهد که توسط یک دنباله تناوبی تشکیل شده است (در اینجا دو دوره وجود دارد م-سکانس با
).
بخش در امتداد محور زمانی تابع عدم قطعیت یک سیگنال رادیویی مدوله شده توسط چنین م- توالی در شکل 2 نشان داده شده است. سطح لوب جانبی، همانطور که توسط تئوری پیش بینی می شود، 1/7 یا منهای 8.5 دسی بل است.
اجازه دهید امکان به حداقل رساندن لوب های جانبی تابع عدم قطعیت سیگنال FCM را در نظر بگیریم. اجازه دهید با نماد نشان دهیم م- sequence، مدت یک دوره برابر است با . در زمان گسسته، مشروط بر اینکه الگوریتم محاسبه عناصر دنباله را می توان به شکل زیر نوشت:
(1)
سیگنال رادیویی منتشر شده توسط مکان یاب حاصل ضرب سیگنال هارمونیک حامل است
, (2)
جایی که
- بردار پارامترهای تابع تعدیل کننده (1) -
. (3)
قدرت سیگنال بین لوب های جانبی تابع عدم قطعیت توزیع می شود -
(4)
و گلبرگ اصلی -
, (5)
که در آن نماد *- نشاندهنده عملکرد ترکیب پیچیده است و محدودیتهای ادغام در حوزههای زمان و فرکانس توسط نوع متناظر مدولاسیون سیگنال تعیین میشوند.
نگرش
(6)
را می توان تابع هدف یک مسئله بهینه سازی پارامتریک در نظر گرفت.
الگوریتم برای حل مسئله.
راه حل مسئله بهینه سازی (6) تخمین پارامتر است -
, (7)
دامنه تعریف بردار کجاست.
روش سنتی برای محاسبه تخمین (7) حل سیستم معادلات است -
. (8)
حل تحلیلی (8) کاملاً کار فشرده است، بنابراین ما از یک روش کمینه سازی عددی بر اساس روش نیوتن استفاده خواهیم کرد.
, (9)
مقداری است که طول گام روند جستجوی حداکثر تابع هدف را تعیین می کند.
یکی از راه های محاسبه طول گام این است که:
. (10)
در ساده ترین حالت، هنگامی که بردار از یک پارامتر تشکیل شده است، به عنوان مثال یا، سیگنال کاوشگر نسبتاً ساده تولید می شود. به طور خاص، هنگام بهینه سازی تابع هدف بر اساس پارامتر، سیگنال مطابق با رابطه تولید می شود
. (11)
در شکل شکل 3 قطعه ای از ماژول تابع همبستگی خودکار سیگنال (11) را نشان می دهد که مربوط به یک سیگنال رادیویی PCM بدون مدولاسیون فاز درون پالس است.
سطح لوب جانبی این تابع مطابق با حد نظری برابر است با , جایی که . در شکل شکل 4 قطعه ای از ماژول تابع همبستگی خودکار سیگنال (11) را با پارامتر به دست آمده از بهینه سازی تابع () نشان می دهد. سطح لوب جانبی منهای 150 دسی بل است. همین نتیجه با مدولاسیون دامنه به دست می آید م-سکانس ها در شکل شکل 5 ظاهر چنین سیگنالی را در مقدار بهینه نشان می دهد.
برنج. 5. قطعه سیگنال FCM مدوله شده با دامنه
سیگنال کاوشگر مطابق با الگوریتم تولید می شود
. (12)
مدولاسیون همزمان دامنه-فاز منجر به کاهش در لوب جانبی با مرتبه دیگری می شود. به دلیل خطاهای محاسباتی اجتناب ناپذیر روش تکراری برای کمینه کردن تابع هدف () که به فرد اجازه نمی دهد مقدار واقعی پارامتر را پیدا کند، بلکه فقط نزدیکی مشخص آن را پیدا می کند، رسیدن به سطح صفر لوب جانبی ممکن نیست. - . در شکل شکل 6 وابستگی مقادیر ضرایب مدولاسیون فاز بهینه را به پارامتر نشان می دهد که طول دنباله را تعیین می کند.
برنج. 6. وابستگی تغییر فاز بهینه به طول M-دنباله ها
از شکل مشاهده می شود که با افزایش طول دنباله، مقدار تغییر فاز بهینه به طور مجانبی به صفر میل می کند و در این حالت می توانیم فرض کنیم که سیگنال بهینه با مدولاسیون فاز درون پالس عملاً با سیگنال PCM معمولی تفاوتی ندارد. تحقیقات نشان می دهد که با افزایش طول دوره تعدیل کننده PSP، حساسیت نسبی به اعوجاج سیگنال کاهش می یابد.
یک معیار تحلیلی برای انتخاب طول دنباله حدی می تواند رابطه زیر باشد
, (13)
جایی که عددی است که امکان اجرای فنی سیگنال با مدولاسیون درون پالس در تجهیزات را تعیین می کند.
ارزیابی امکان سنجی پیچیده کردن سیگنال
عارضه اجتناب ناپذیر سیگنال با کاهش لوب های جانبی تابع همبستگی به طور قابل توجهی الزامات دستگاه های تولید و مسیرهای انتقال و دریافت سیگنال را سخت تر می کند. بنابراین، اگر در تنظیم ضریب فاز روی یک هزارم رادیان خطایی رخ دهد، سطح لوب جانبی از منفی 150 دسی بل به منفی 36 دسی بل افزایش می یابد. با مدولاسیون دامنه، خطا نسبت به مقدار بهینه ضریب آیک هزارم منجر به افزایش لوب جانبی از منفی 150 دسی بل به منفی 43 دسی بل می شود. اگر خطاها در تنظیم پارامترها 0.1 از موارد بهینه باشد که می توان آن را در تجهیزات پیاده سازی کرد، آنگاه لوب جانبی تابع عدم قطعیت به منفی 15 دسی بل افزایش می یابد که 7 - 7.5 دسی بل بهتر از عدم وجود موارد اضافی است. مدولاسیون فاز و دامنه
از سوی دیگر، لوب جانبی تابع عدم قطعیت را می توان بدون پیچیده کردن سیگنال با افزایش کاهش داد. بنابراین در سطح لوب جانبی تقریباً منهای 15 دسی بل خواهد بود. لازم به ذکر است که سیگنال های PCM معمولی (به عنوان مثال، بدون مدولاسیون اضافی AM-FM) به خطاهایی که در طول شکل گیری آنها ایجاد می شود حساس هستند. بنابراین طول مافزایش توالی در دستگاه های رادار واقعی نیز غیرعملی است.
اجازه دهید تأثیر خطاهایی را که در تجهیزات در هنگام شکل گیری، انتقال، دریافت و پردازش سیگنال های رادیویی FCM روی ویژگی های آنها رخ می دهد، در نظر بگیریم.
ارزیابی تأثیر خطاها در تشکیل سیگنال FCM بر روی خواص آن.
کل مجموعه عوامل موثر بر ویژگی های سیگنال را می توان به دو گروه تقسیم کرد: نوسان و قطعی.
عوامل نوسان عبارتند از: ناپایداری فرکانس فاز نوسانگرهای مرجع. صداهای مختلف؛ سیگنالهایی که مستقیماً از فرستنده به ورودی گیرنده نشت میکنند و پس از پردازش همبستگی با سیگنال مرجع، فرآیندهای نویز مانند و سایر عوامل را تشکیل میدهند.
عوامل قطعی عبارتند از: پهنای باند ناکافی مدارهای تشکیل دهنده. عدم تقارن تابع تعدیل؛ عدم انسجام تابع تعدیل و نوسان حامل. تفاوت در شکل سیگنال های مرجع و کاوشگر و غیره
به طور کلی، بیان تحلیلی برای یک سیگنال مدوله شده توسط یک شبه تصادفی م- دنباله، آن را به شکل نشان دهید
, (14)
جایی که ؛ - دامنه ثابت؛ یا پ- فاز سیگنال؛ ن=2ک-1; ک-عدد صحیح - مدت زمان نبض ابتدایی که دنباله را تشکیل می دهد.
تابع همبستگی دو بعدی آن به صورت زیر نوشته شده است:
(15)
در
، و طیف نرمال شده آن در شکل 7 نشان داده شده است. در اینجا، برای وضوح، بخشی از محور فرکانس نشان داده شده است، که در آن اجزای اصلی طیف سیگنال متمرکز شده اند. یک ویژگی مشخصه چنین سیگنالی، همانطور که از شکل 7 مشاهده می شود، سطح کاهش یافته نوسان حامل تعدیل نشده است که در حالت ایده آل به سمت صفر میل می کند.
شکل 7. طیف سیگنال نرمال شده
باند وسیع طیف و عدم وجود نوسانات مدوله نشده دوره ای، پیاده سازی الگوریتم هایی را برای تشخیص و شناسایی اشیاء در سیستم های مکان یابی مانند، با سیگنال مفید در موانع به میزان 40-50 دسی بل ضعیف شده و سطوح تداخل همبسته بیش از 50- سیگنال را ممکن می سازد. 70 دسی بل
برنج. 8. چگالی طیفی سیگنال تحریف شده
در صورتی که اعوجاج سیگنال توسط توابع قطعی در مختصات تغییر داپلر - تاخیر مشخص شود، بهتر است تاثیر آنها را بر پارامترهای تابع همبستگی خودکار سیگنال در نظر بگیریم، به عنوان مثال، به شکل خطای زیر. کارکرد.
بنابراین، برای یک سیگنال شبه تصادفی با کلید فاز با ن 15 =، وابستگی سطح لوب جانبی باقیمانده تابع همبستگی خودکار به پهنای باند مدارهای شکل دهنده و مسیر رادیویی در شکل نشان داده شده است. 9.
شکل 9. وابستگی سطح لوب جانبی ACF به پهنای باند
انتقال مسیر شکل گیری برای ک=4
در اینجا، محور ارتین مقداری را نشان می دهد که حداکثر سطح قابل دستیابی لوب جانبی تابع همبستگی خودکار را تعیین می کند - یک سیگنال مدوله شده توسط یک شبه تصادفی م- دنباله، و در امتداد محور آبسیسا - به عنوان درصد، نسبت پهنای باند مدار شکل دهنده به حداکثر مقدار فرکانس طیف موثر سیگنال بیان می شود. نقاط روی نمودار مقادیر سطح لوب جانبی ACF را نشان می دهد که از شبیه سازی عددی جلوه های سخت افزاری به دست آمده است. همانطور که از شکل 9 مشاهده می شود، در صورت عدم وجود اعوجاج فرکانس در مسیرهای رادیویی، سطح لوب جانبی سیگنال ACF توسط فاز PSP دوره ای با یک دوره تعدیل می شود. ن، است – 1/ ن. این با حد نظری شناخته شده مطابقت دارد. هنگامی که طیف سیگنال مدوله شده محدود است، سطح لوب جانبی افزایش می یابد و در محدودیت 50٪ به سطحی می رسد که مربوط به یک تابع خودهمبستگی غیر دوره ای است. محدودیت بیشتر طیف سیگنال رادیویی منجر به فروپاشی تقریباً کامل ACF و در نتیجه ناتوانی در استفاده از سیگنال برای اهداف عملی می شود.
اعوجاج طیف سیگنال ساطع شده توسط مکان یاب و نوسانات مرجع وارد شده به همبسته، به دلیل عدم تقارن بین سطوح مثبت و منفی و مدت زمان نوسانات تعدیل کننده، منجر به افزایش قابل توجه تداخل در ناحیه جانبی می شود. لوب های ACF و بدتر شدن وضوح فضایی و ویژگی های تشخیص مکان یاب. وابستگی سطح لوب جانبی به ضریب عدم تقارن در شکل 10 نشان داده شده است.
ضریب عدم تقارن به صورت تعیین شد
, (16)
مدت زمان تشکیل پالس ابتدایی تحریف نشده کجاست م- دنباله؛ شاخص های "+" و "-" به معنای مدت زمان پالس ابتدایی مثبت و منفی با اعوجاج نامتقارن است.
شکل 10. وابستگی سطح لوب جانبی ACF به میزان اعوجاج سیگنال نامتقارن برای ک=4.
نتیجه.
انتخاب سیگنال و درجه پیچیدگی عملکرد تعدیل کننده آن در درجه اول توسط ماهیت وظایفی که رادار برای آنها در نظر گرفته شده است تعیین می شود. استفاده از سیگنال FCM نسبتاً پیچیده با مدولاسیون درون پالس مستلزم ایجاد تجهیزات دقیق است که به ناچار منجر به افزایش قابل توجه قیمت طراحی می شود، اما در عین حال امکان ایجاد واحدهای جهانی قابل استفاده را فراهم می کند. هم در رادارهای امدادگران و هم در رادارهای تشخیص هواپیماهای سریع پرواز. این احتمال به این دلیل به وجود می آید که ویژگی های یک سیگنال پیچیده با طول توالی کوتاه، یعنی. نرخ تکرار ارسال بالا، به شما این امکان را می دهد که وضوح و ایمنی نویز لازم را با توانایی اندازه گیری فرکانس های داپلر در محدوده وسیع تری داشته باشید. علاوه بر این، ساخت سیستمهای راداری با تشعشع پیوسته و مدولاسیون فاز شبه تصادفی موج حامل، مستلزم تجزیه و تحلیل دقیق و در نظر گرفتن تمام عواملی است که باعث اعوجاج سیگنال در هر دو مسیر ارسال و دریافت مکان یاب میشود. در نظر گرفتن عوامل تحریف کننده به حل مشکلات مهندسی برای اطمینان از پهنای باند کافی، پایداری پارامترهای الکتریکی و پایداری ویژگی های مسیرهای شکل دهی منجر می شود. در این حالت، سیگنال های کاوشگر رادار باید با سیگنال های تعدیل کننده و کمکی هماهنگ باشند. در غیر این صورت، راه حل های فنی مورد نیاز است که اعوجاج اختلاف بین نوسانات تابشی و مرجع را به حداقل برساند. یکی از راه های ممکن برای پیاده سازی چنین راه حل های فنی، معرفی محدودیت های دامنه متقارن سیگنال ها در مراحل خروجی فرستنده و در ورودی همبسته گیرنده است. در این حالت، اگرچه بخشی از انرژی سیگنال از بین می رود، می توان یک ACF از سیگنال مدوله شده با پارامترهای قابل قبول تشکیل داد. چنین راهکارهای فنی در رادارهای قابل حمل قابل قبول است که هزینه و ابعاد سیستم نقش تعیین کننده ای دارد.
امیدوارکننده ترین در حال حاضر، از دیدگاه نویسندگان، باید ساخت دستگاه هایی برای تولید و پردازش سیگنال های رادیویی با ساختار پیچیده برای تجهیزات رادار، بر اساس پردازنده های سیگنال پرسرعت که در فرکانس های ساعت چند گیگاهرتز کار می کنند، در نظر گرفت. نمودار ساختاری رادار با این رویکرد بسیار ساده می شود. اینها یک تقویت کننده توان خطی، یک تقویت کننده گیرنده خطی کم نویز و یک پردازنده با دستگاه های جانبی هستند. این طرح نه تنها اجازه می دهد تا تقریباً به طور کامل ویژگی های سیگنال های ذاتی در ساختار ظریف آنها را درک کند، بلکه همچنین امکان ایجاد سیستم های راداری با قابلیت راه اندازی فن آوری آسان را فراهم می کند که پردازش اطلاعات آنها بر اساس الگوریتم های بهینه است.
ادبیات
1. فرانک U.A.، کراتزر D.L.، سالیوان J.L. رادار دو پوندی // RCA Eng.- 1967. شماره 2; ص 52-54.
2. رادار داپلر برای شناسایی روی زمین. سر. فنی هوش یعنی سقف خدمات حالت // VINITI. – 1376. – شماره 10. – ص 46-47.
3. نوردوال بروس دی.رادار فوق پهن باند مین های مدفون را شناسایی می کند // Aviat. هفته و فناوری فضایی- 1376. شماره 13.-ص. 63-64.
4. Sytnik O.V. ویازمیتینوف I.A.، Myroshnychenko Y.I. ویژگی های توسعه رادار برای تشخیص افراد تحت انسداد // مهندسی مخابرات و رادیو.¾ 2004. ¾. برآورد اثر خطاهای پیاده سازی بر ویژگی های سیگنال رادار شبه تصادفی // مهندسی مخابرات و رادیو.¾ 2003. ¾ جلد 60، شماره 1 و 2. ¾ ص 132-140.
9. راهنمای رادار / ویرایش. M. Skolnik. مطابق. از انگلیسی اد. K.N. Trofimova. ، M.: Sov. رادیو، 1978، جلد 3. 528s.






سیگنالهای قفسه گسترده نیز شامل سیگنالهایی با فرکانس مدولاسیون خطی درون پالس (چیرپ) میشوند. می توان آن را در قالب ارائه کرد
که در آن φ(t) فاز کل است.
فرکانس داخل پالس طبق قانون زیر تغییر می کند
![]() ,
,
جایی که Δf انحراف فرکانس است.
فاز کل در زمان t با ادغام فرکانس به دست می آید:

بنابراین، فاز کل سیگنال طبق یک قانون درجه دوم تغییر می کند. با در نظر گرفتن فاز چیرپ کامل، سیگنال را می توان به شکل زیر نوشت
پایه سیگنال ![]() . ظاهر سیگنال چیپ در شکل 4.179 نشان داده شده است.
. ظاهر سیگنال چیپ در شکل 4.179 نشان داده شده است.
پردازش بهینه سیگنال چیپ نیاز به وجود یک فیلتر همسان با یک مشخصه منعکس شده با توجه به سیگنال دارد. در بین فیلترهای آنالوگ، این یک خط تاخیر پراکنده است که زمان تاخیر آن به فرکانس بستگی دارد.
یک نمودار ساده شده از یک فیلتر منطبق برای سیگنال چیپ در شکل 4.180 نشان داده شده است.

با استفاده از فرمول، طیف سیگنال را در خروجی فیلتر همسان پیدا می کنیم
که در آن K(jω) تابع انتقال فیلتر همسان است.
S(jω) - طیف سیگنال چیپ خارجی.
ظاهر طیف S(jω) در شکل 4.181 نشان داده شده است

لحظه ای که حداکثر سیگنال خروجی ظاهر می شود کجاست.
K یک ثابت است.
اگر مدول چگالی طیفی را برابر با یک مقدار ثابت بگذاریم، به دست می آوریم

که در آن B دامنه مولفه های طیفی است.
مطابق با قضیه پارسوال
سیگنال را در خروجی فیلتر همسان در حوزه زمان با استفاده از تبدیل فوریه صفحه طیفی پیدا خواهیم کرد.

با ادغام روی فرکانس های مثبت و جداسازی قسمت فعال، به دست می آوریم
بنابراین، پالس خروجی K برابر باریکتر از پالس ورودی شد و دامنه آن یک ضریب افزایش یافت.
ظاهر پالس در شکل 4.172 نشان داده شده است

عرض لوب اصلی در صفرها 2/Δf و در سطح 0.64-1/Δf است. نسبت تراکم در این سطح برابر خواهد بود
نمودار عدم قطعیت سیگنال چیپ در شکل 4.183 نشان داده شده است.
با باند فرکانس اشغال شده، چیپ بهترین سیگنال برای وضوح زمانی است.
مکانیسم فشرده سازی سیگنال در فیلتر بهینه را می توان به صورت زیر توضیح داد. فیلتر بهینه اجزای طیفی را برای مدتی به تاخیر می اندازد:
![]() (4.104)
(4.104)
فرکانس متوسط کجاست
انحراف فرکانس؛
مدت زمان نبض؛
زمان رسیدن به حداکثر پالس فشرده شده است.
وابستگی زمان تاخیر به فرکانس (4.104) در شکل 4.184 نشان داده شده است. زمان تاخیر یک تابع خطی کاهشی فرکانس است. وابستگی زمان تاخیر به فرکانس را پراکندگی می گویند.

در زمان t، فرکانس لحظه ای سیگنال در ورودی فیلتر برابر است. نوسان این فرکانس با تأخیر به خروجی فیلتر می رسد، یعنی. در حال حاضر . بیایید این لحظه را تعریف کنیم:
در نتیجه، تمام اجزای طیفی سیگنال (صرف نظر از فرکانس آنها) برای مدتی در فیلتر به تأخیر می افتند که در یک زمان به طور همزمان به خروجی آن می رسند. در نتیجه جمع حسابی، یک موج پیک سیگنال تشکیل می شود. (شکل 4.185)

شکل پالس رادیویی فشرده در غیاب عدم تطابق فرکانس توسط طیف دامنه فرکانس سیگنال ورودی تعیین می شود. طیف فرکانس فاز، در این مورد، با پاسخ فرکانس فاز فیلتر جبران می شود و بر شکل سیگنال ورودی تأثیر نمی گذارد. جبران طیف فرکانس فاز سیگنال دلیل اصلی است
فشرده سازی زمان، منجر به برهم نهی هماهنگ اجزای هارمونیک می شود.
پردازش سیگنال FCM
یک سیگنال دستکاری شده با کد فاز، یک سیگنال پالسی است که به پالس های موازی تقسیم می شود، که هر کدام فاز اولیه خود را دارند (شکل 4.186).

برای چنین سیگنالی رابطه برقرار است
که در آن N تعداد پالس های جزئی در سیگنال است.
Δf - عرض طیف سیگنال.
کدهای فاز معمولا باینری هستند، اما می توانند پیچیده تر باشند. سیگنال FCM را می توان به عنوان قطاری از پالس های منسجم نشان داد. برای چنین بسته ای، آشکارساز بهینه در شکل 4.187 نشان داده شده است
ویژگی های طرح به شرح زیر است:
· تأخیر بین شیرهای خط مجاور، تأخیرها باید برابر با مدت زمان پالس جزئی τ 1 باشد.
· برخی از ضربه های خط تاخیر باید شامل تغییر دهنده های فاز باشد که جمع حالت مشترک سیگنال ها را فراهم می کند.
بلوک دیاگرام آشکارساز سیگنال PCM بهینه در شکل 4.188 نشان داده شده است

نمودار نشان می دهد: PV - تغییر فاز. SF - فیلتر همسان. شکل 4.189 و 4.190 مدارهای آشکارساز بهینه و نمودارهای ولتاژ را برای یک سیگنال متشکل از سه پالس جزئی نشان می دهد.

یکی از پارامترهای اصلی که یک سیستم رادار را مشخص می کند، ضریب تشخیص است که به عنوان نسبت حداقل قدرت سیگنال در ورودی گیرنده P min به توان نویز تعریف می شود.
عملکرد تشخیص به انرژی سیگنال بستگی دارد