Atunci când utilizați un computer pentru a procesa informații de la diferite dispozitive (obiecte, procese), în care informațiile sunt reprezentate de semnale continue (analogice), este necesar să convertiți un semnal analogic într-unul digital - într-un număr proporțional cu amplitudinea acestuia. semnal și invers. În general, procedura de conversie analog-digitală constă din trei etape:
discretizare;
cuantificare pe nivel;
codificare.
Sub discretizare înțelegeți transformarea unei funcție de timp continuu într-o funcție de timp discret, iar procesul de discretizare în sine constă în înlocuirea unei funcții continue cu valorile sale individuale în momente fixe în timp.
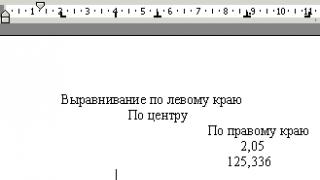
Discretizarea poate fi uniformă sau neuniformă. În cazul eșantionării neuniforme, durata intervalelor dintre probe este diferită. Eșantionarea uniformă cel mai frecvent utilizată, în care durata intervalului dintre probe T D, este constantă. Perioada de prelevare T D semnal continuu u(t)(Fig. 1 a) este selectat în conformitate cu teorema Kotelnikov:
Unde F în- cea mai mare frecvență din spectrul de frecvență al semnalului u(t)(Fig. 1 b)

Orez. 1.Procesul de conversie A/D
Sub cuantizarea înțelegeți transformarea unei cantități cu o scară continuă de valori într-o mărime cu o scară discretă de valori.
Pentru aceasta, întreaga gamă de valori ale semnalului u(t), numită scară este împărțită în părți egale - cuante, h- pas de cuantizare. Procesul de cuantificare se reduce la înlocuirea oricărei valori instantanee cu una dintr-un set finit de valori permise, numite niveluri de cuantizare.
Tipul semnalului u(t) ca urmare a operaţiilor comune de eşantionare şi cuantificare este prezentată în fig. 1 c). Valoarea semnalului discret u(t), situat între două niveluri de cuantizare este identificat cu cel mai apropiat nivel de cuantizare. Acest lucru duce la erori de cuantizare, care sunt întotdeauna mai mici decât pasul de cuantizare (cuantică), adică cu cât este mai mic pasul de cuantizare, cu atât eroarea de cuantizare este mai mică, dar cu atât nivelurile de cuantizare sunt mai mari.
Numărul de niveluri de cuantizare din fig. 1 c) este egal cu opt. De obicei, sunt mult mai mulți. Puteți numerota nivelurile și le puteți exprima în sistemul de numere binar. Pentru opt niveluri, trei biți sunt suficienți. Fiecare valoare a semnalului discret este reprezentată în acest caz printr-un cod binar (Tabelul 1) ca o secvență de semnale de două niveluri.
Tabelul 6.1
Prezența sau absența unui impuls într-un anumit loc este interpretată prin unu sau zero în cifra corespunzătoare a numărului binar. Reprezentarea semnalului digital u(t) prezentată în fig. 1 g). Impulsurile celor mai semnificativi biți sunt situate în extrema dreaptă.
Astfel, ca rezultat al eșantionării, cuantizării și codificării semnalului analogic, obținem secvența n-cuvinte de cod de biți care urmează cu o perioadă de eșantionare T l.În același timp, implementarea rațională a operațiunilor de discretizare și cuantizare conduce la un efect economic semnificativ, atât prin reducerea costului de stocare și prelucrare a informațiilor primite, cât și prin reducerea timpului de procesare a informațiilor.
5. Sisteme de transmisie digitală. Fundamentele construirii sistemelor și rețelelor de telecomunicații5. Sisteme de transmisie digitală
5.1. Semnale digitale: eșantionare, cuantizare, codificare
În prezent, în întreaga lume se dezvoltă o formă digitală de transmisie a semnalului: telefonie digitală, televiziune digitală prin cablu, sisteme digitale de comutare și sisteme de transmisie, rețele de comunicații digitale. Calitatea comunicațiilor digitale este mult mai mare decât cea a comunicațiilor analogice, deoarece semnalele digitale sunt mult mai rezistente la interferențe: nu există acumulare de zgomot, sunt ușor de procesat, semnalele digitale pot fi „comprimate”, ceea ce permite organizarea mai multor canale cu viteză mare de transmisie și calitate excelentă într-o bandă de frecvență.
semnal digital este o succesiune de impulsuri. În general, este acceptat să se reprezinte secvența pulsului ca o alternanță de două caractere: 0 și 1. „Cifră binară” - „cifră binară”. De aici a venit conceptul de biți, adică o poziție într-un semnal digital este 1 bit; poate fi fie 0, fie 1. Cele opt poziții dintr-un semnal digital sunt definite de concept octet .
La transmiterea semnalelor digitale se introduce conceptul de viteză de transmisie - acesta este numărul de biți transmiși pe unitatea de timp (pe secundă).
Pentru a transmite mesaje continue prin metode digitale, este necesară convertirea acestor mesaje în mesaje discrete, care se realizează prin eșantionarea în timp a semnalelor continue și cuantizarea lor în termeni de nivel și conversia citirilor cuantificate într-un semnal digital.
Eșantionarea semnalului constă în înlocuirea mesajului continuu u la (t) cu o succesiune a probelor sale, adică o secvență de impulsuri modulate în amplitudine (vezi Figura 5.1, a). Frecvența de eșantionare F d este selectată din condiția (4.4.1). Semnalul analog AIM rezultat u AIM (iT d), unde i = 1, 2, 3 ..., prezentat în Figura 5.1, a, este apoi supus unei operații de cuantizare, care constă în înlocuirea citirilor valorilor instantanee a semnalului u AIM (iT d) cu valori discrete u 0 , u 1 , u 2 … u 7 niveluri admise u pătrat (iT d). În procesul de cuantizare, valorile instantanee AIM ale nivelurilor de semnal u AIM (iT d) sunt înlocuite cu cele mai apropiate niveluri de semnal permise u kv (iT d) (vezi Figura 5.1, a).
Figura 5.1. Principiul PCM: a – discretizare; b – eroare de cuantizare; c - semnal digital cu PCM
O astfel de transformare a semnalelor primare poate fi numită modulație cuantificată a amplitudinii pulsului (KAIM). O caracteristică a unui astfel de semnal este că toate nivelurile sale pot fi numerotate și, prin urmare, pot reduce transmisia unui semnal KAIM la transmisia de secvențe de numere de nivel pe care acest semnal le primește în momentele i∙t e.
Distanța dintre cele mai apropiate niveluri de cuantizare permise (u 0 ... u 7 în Figura 5.1, a) ∆ se numește pas de cuantizare. Scara de cuantizare se numește uniformă dacă toate treptele de cuantizare sunt egale între ele ∆ j = ∆ 0 .
Dacă în momentul prelevării probei i-a, valoarea instantanee a mesajului continuu u la (t i) satisface condiția
u j – ∆ j /2 ≤ u AIM (iT d) ≤ u j + ∆ j /2, (5.1)
apoi pulsului cuantificat u kv (iT d) i se atribuie amplitudinea nivelului de cuantizare admis u j (vezi Figura 5.1, a). În acest caz, apare o eroare de cuantizare δ kv, reprezentând diferența dintre valoarea cuantificată transmisă u kv (iT d) și valoarea adevărată a semnalului continuu la un moment dat u AIM (iT d) (vezi Figura 5.1, b) :
δ qv (iT d) \u003d u qv (iT d) - u AIM (iT d). (5,2)
După cum reiese din figurile 5.1, b și (5.1), eroarea de cuantizare se află în interiorul
–∆ 0 /2 ≤ δ sq ≤ ∆ 0 /2. (5,3)
Caracteristica de amplitudine a dispozitivului de cuantizare cu o scară de cuantizare uniformă este prezentată în Figura 5.2, a. Are o formă în trepte, iar când mesajul continuu u la (t) și semnalul AIM corespunzător u AIM (iT d) se modifică într-un singur pas, semnalul de ieșire rămâne constant, iar când se atinge limita acestui pas, se modifică brusc de valoarea pasului de cuantizare. În acest caz, eroarea de cuantizare depinde de la u la (t) și are forma prezentată în Figura 5.2, b.

Figura 5.2. Caracteristica de amplitudine a cuantificatorului (a) și dependența erorii de cuantizare de amplitudinea impulsurilor (b)
După cum reiese din Figura 5.2, b, datorită neliniarității caracteristicii de amplitudine a cuantificatorului, eroarea de cuantizare δ kv este o funcție cu un număr mare de salturi ascuțite, a căror rată de repetare este semnificativ mai mare decât frecvența de mesajul original de la u la (t), adică în timpul cuantizării, spectrul semnalului se extinde. În acest caz, benzile laterale adiacente se vor suprapune și componentele spectrului de distorsiune de cuantizare vor cădea în banda de trecere a filtrului trece-jos la ieșirea canalului, a cărui distribuție în banda trece-jos este considerată uniformă. Deoarece aproape toate valorile discrete ale unui mesaj continuu sunt în zona de cuantizare de la –u limită la +u limită, atunci cu o scară uniformă de cuantizare ∆ j = ∆ 0 și apoi:
Pkv \u003d (1/12) ∆ 2 0. (5,4)
Din expresia (5.4) se poate observa că la o scară de cuantizare uniformă, puterea zgomotului de cuantizare nu depinde de nivelul semnalului cuantizat și este determinată doar de pasul de cuantizare ∆ 0 .
Luați în considerare acum codificarea și decodificarea semnalelor. Următorul pas în conversia semnalului este convertirea semnalului AIM cuantificat în digital. Această operație se numește codificare a semnalului AIM. Un cod este o lege care stabilește o corespondență între amplitudinea cuantificată și structura grupului de coduri.
Distingeți codurile uniforme și neuniforme. Dacă toate grupurile de coduri constau dintr-un număr egal de caractere, atunci codul se numește uniform. Dacă grupurile de coduri constau dintr-un număr diferit de caractere, atunci codul se numește neuniform. În sistemele de transmisie PCM, de regulă, se utilizează un cod binar uniform.
Pentru a determina structura cuvântului de cod binar la ieșirea codificatorului, în cel mai simplu caz, este necesar să se scrie în codul binar amplitudinea probelor AIM, exprimată în pași de cuantizare
unde a i = (0,1) este starea cifrei corespunzătoare a combinației; 2 i este greutatea cifrei corespunzătoare în pași de cuantizare.
Dacă în sistemul zecimal „greutatea” fiecărei poziții a numărului este într-o oarecare măsură egală cu numărul zece, atunci în sistemul binar, în loc de numărul zece, se folosește numărul doi. „Greutățile” primelor treisprezece poziții ale unui număr binar au următoarele semnificații:
Tabelul - 5.1
Conform principiului de funcționare, codificatoarele sunt împărțite în codificatoare de tip de numărare, matrice, tip de ponderare și altele. Cele mai frecvent utilizate codificatoare de tip ponderare, dintre care cel mai simplu este codificatorul de ponderare pe biți (Figura 5.3), care implementează funcția (5.5) din formarea unui cod binar natural. Principiul de funcționare al unui astfel de encoder este de a echilibra citirile AIM codificate cu suma tensiunilor de referință. Circuitul codificatorului liniar de cântărire pe biți conține opt celule (pentru m = 8) care asigură formarea valorii coeficientului a i al bitului corespunzător (5.5). Fiecare celulă (cu excepția ultimei, care corespunde cifrei mai puțin semnificative) include un circuit de comparație CC și un circuit de scădere CB.
Circuitul de comparație oferă o comparație a amplitudinii semnalului AIM de intrare cu semnale de referință, ale căror amplitudini sunt egale cu greutățile biților corespunzători
U et8 = 2 7 ∆ = 128∆; U et7 = 2 6 ∆ = 64∆; … U et1 = 2 0 ∆ = 1∆.
Dacă la intrarea lui SS i amplitudinea semnalului AIM de intrare este egală cu sau depășește U eti, atunci se formează un „1” la ieșirea circuitului de comparație, iar în SS i U eti este scăzut din semnalul de intrare, după care intră în intrarea celulei următoare. Dacă amplitudinea semnalului AIM la intrarea SS i este mai mică decât U eti , atunci ieșirea SS i este formată de „0” și semnalul AIM trece prin CB i neschimbat. După încheierea procesului de codificare a probei curente, se obține un cod paralel de opt biți la ieșirea codificatorului, codificatorul este setat la starea sa inițială și începe codificarea următoarei mostre.

Figura 5.3. Codificator liniar pe biți
Dacă, de exemplu, a fost primit un număr AIM cu amplitudinea U AIM = 185∆ la intrarea codificatorului, atunci SS 8 generează P 8 = 1, iar un semnal cu amplitudinea U AIM = 185∆ - 128∆ = 57∆ a fost primit la intrarea celei de-a șaptea celule. La ieșirea SS 7 se va forma P 7 = 0, iar la intrarea celei de-a șasea celule a codificatorului va fi trimis un semnal cu aceeași amplitudine U AIM = 57∆. La ieșirea SS 6, se va forma P 6 = 1, iar la intrarea următoarei celule va fi trimis un semnal cu amplitudinea U AIM = 57∆ - 32∆ = 25∆ și așa mai departe. Ca rezultat, va fi generată combinația de cod 10111001.
În procesul de decodare , combinaţiile de coduri m - biţi ale semnalului sunt convertite în mostre AIM de amplitudinea corespunzătoare . Semnalul la ieșirea decodorului se obține ca urmare a însumării semnalelor de referință U ale acestor biți ai combinației de coduri, a căror valoare este egală cu 1 (Figura 5.4). Deci, dacă combinația de cod 10111001 a fost primită la intrarea decodorului, atunci amplitudinea citirii AIM la ieșirea sa va fi egală cu U AIM = 128∆ + 32∆ + 16∆ + 8∆ + 1∆ = 185∆ .
În decodorul liniar (Figura 5.4), sub influența semnalelor de control provenite de la echipamentul generator, în registrul de deplasare este scrisă o altă combinație de cod de opt biți. În momentul sosirii impulsului de citire sunt închise doar acele taste CL 1 ... CL 8, care corespund biților cu valoarea „1”. Ca rezultat, tensiunile de referință corespunzătoare sunt combinate în sumator și se obține amplitudinea de citire AIM corespunzătoare la ieșire.

Figura 5.4. Decodor de tip ponderare a liniilor
Circuitul codificator de ponderare pe biți considerat (Figura 5.3) conține un număr mare de circuite de comparație, care sunt dispozitive relativ complexe. În practică, un encoder de tip ponderare cu un circuit de comparație și o buclă de feedback care conține un decodor este mai des utilizat. După cum rezultă din expresia (5.4), puterea zgomotului de cuantizare în codificare liniară va fi egală pentru diferite amplitudini ale semnalelor cuantificate. Pentru semnalele sinusoidale, raportul semnal-zgomot de cuantizare este calculat folosind formula:
 ,
(5.6)
,
(5.6)
unde U m este amplitudinea semnalului cuantificat.
Din formula se poate observa că pentru semnalele de intrare slabe acest raport este mult mai rău decât pentru semnalele cu amplitudine mare. Pentru a elimina acest neajuns, s-a propus utilizarea cuantizării neuniforme, adică modificarea etapei de cuantizare proporțional cu modificarea amplitudinii semnalului de intrare.
Pentru codificare cu scară de cuantizare neuniformă se pot folosi:
- codificare directă neliniară, în care codificatorul combină funcțiile unei conversii analog-digitale (ADC) și ale unui compresor;
- compresare analogică, în care semnalul este comprimat înaintea codificatorului liniar și semnalul este extins după decodorul liniar;
- conversie bazată pe codare liniară, în care semnalul este codificat într-un encoder liniar cu un număr mare de biți, urmat de compresare digitală.
O dimensiune variabilă a pasului de cuantificare poate fi obținută folosind un dispozitiv cu un răspuns de amplitudine neliniar (Figura 5.5) (numit compresor deoarece comprimă domeniul dinamic al semnalului de intrare) și un cuantificator uniform (vezi Figura 5.2). Pe partea de recepție, domeniul dinamic este extins de un expander, care are o caracteristică opusă compresorului, care asigură liniaritatea sistemului de transmisie. Setul de operații pentru comprimarea intervalului dinamic cu un compresor și extinderea acestuia cu un expander se numește compading de semnal.
În prezent, sistemele PCM TDM utilizează caracteristica de compadding de tip A (Figura 5.5).

În această figură, o caracteristică de compresie de tip A segmentată pentru semnale pozitive (pentru semnale negative, caracteristica are o formă similară). Numărul total de segmente ale caracteristicii este N c = 16, cu toate acestea, cele patru segmente centrale (câte câte două în regiunile pozitive și negative) au aceeași treaptă de cuantizare și formează de fapt un singur segment, în urma căruia numărul de segmente este N c = 13. Prin urmare, această caracteristică se numește tip A = 87,16/13. În segmentul central (N c = 1 sau 2), valoarea lui ∆ 0 este minimă (adică egală cu ∆ 0) și corespunde unei scale uniforme de douăsprezece cifre (m = 12), iar în fiecare segment ulterior, spre marginile caracteristicii treapta de cuantizare se dublează.
Reprezentarea unui semnal PCM prin combinații de cod de opt biți utilizează formatul „semn – valoare absolută”, unde un bit reprezintă polaritatea semnalului AIM P, iar restul determină valoarea lui absolută. Cele șapte cifre care reprezintă valoarea absolută sunt subîmpărțite în determinantul numărului de segment C de trei cifre și determinantul pasului de cuantizare K de patru cifre (Figura 5.6).

Figura 5.6. Format combinat PCM pe 8 biți
Pentru a implementa un astfel de encoder, este necesar să setați valorile tensiunilor de referință pentru limita inferioară a fiecărui segment și la codificarea în cadrul segmentului (Tabelul 5.2).
Schemele și principiul de funcționare ale codecurilor neliniare de tip ponderare sunt practic aceleași cu cele ale codecurilor liniare. Diferența constă în secvența în care tensiunile de referință sunt pornite în timpul codificării semnalului original.
Tabelul 5.2. Tensiuni de referință pentru un codec neliniar
| Numărul de segment N cu |
Tensiunea de referință a limitei inferioare a segmentului |
Tensiuni de referință la codificare în cadrul unui segment |
|||
Astfel, pasul maxim de cuantizare (în al șaptelea segment) este de 64 de ori mai mare decât pasul minim de cuantizare, iar raportul semnal-zgomot al cuantizării (pentru valoarea maximă a semnalului sinusoidal) poate fi determinat prin expresia (5.6) si va fi: pentru al doilea segment
R s - R w q \u003d 7,78 + 20lg (A / ∆) \u003d 7,78 + 20 log (32 ∆ 0 / ∆ 0) \u003d 37,88 dB;
Pentru al șaptelea segment
R s - R w q \u003d 7,78 + 20 lg (2048∆ 0 / 64∆ 0) \u003d 37,88 dB.
Dependența raportului semnal-zgomot al cuantizării de nivelul semnalului de intrare la compactarea conform legii A = 87,6/13 este prezentată în Figura 5.7. Pentru semnalele în limitele segmentelor zero și primului, cuantificarea uniformă se realizează cu un pas ∆ 0, prin urmare P s - R w q crește cu creșterea r s. Când treceți la al doilea segment, pasul de cuantizare se dublează, drept urmare Ps - Pw q scade brusc cu 6 dB, apoi crește în acest segment cu creșterea ps, deoarece cuantificarea uniformă se realizează în cadrul segmentului. După ce semnalul intră în zona de restricție, raportul semnal-zgomot scade brusc din cauza supraîncărcării codificatorului.

Figura 5.7. Dependență P s / R w q \u003d f (r s)
Figura 5.8 prezintă o diagramă simplificată a unui codificator neliniar de tip cântărire care implementează codarea directă a unui semnal AIM.

Codificarea se realizează în opt intervale de ceas, în fiecare dintre acestea fiind format unul dintre simbolurile combinației de coduri (Figura 5.6). În primul ciclu se determină semnul probei primite la intrarea codificatorului. Dacă numărul este pozitiv, atunci se formează un „1” în bitul de semn și un generator de tensiuni de referință pozitive PV 1 este conectat la circuitul de comutare și însumare al standardelor SPSE, în caz contrar se formează un „0” și PV 2 este conectat la circuit. Apoi codul numărului de segment se formează prin împărțirea numărului lor la jumătate (Figura 5.9).

În al doilea ciclu, circuitul logic de control ULS și SPSE furnizează intrare la circuitul de comparație al semnalului de referință U fl = 128 ∆ 0 corespunzător limitei inferioare a celui de-al patrulea segment (de mijloc). Dacă amplitudinea de citire U AIM ≥ U ref = 128 ∆ 0 , atunci se decide că amplitudinea de citire va cădea într-unul dintre cele patru segmente de deasupra și se formează următorul simbol X = 1, care este alimentat prin circuitul de reacție către intrarea ULS. În caz contrar, se ia decizia ca amplitudinea de citire să cadă într-unul dintre segmentele de bază și se formează X = 0.
În al treilea ciclu, în funcție de valoarea simbolului anterior X, se precizează numărul segmentului în care scade amplitudinea probei codificate. Dacă X = 1, atunci ULS și SPSE furnizează tensiunea de referință U et = 512 ∆ 0 corespunzătoare limitei inferioare a celui de-al șaselea segment la intrarea SS. În acest caz, dacă U AIM ≥ U ref = 512 ∆ 0, atunci se decide că citirea se încadrează într-unul dintre cele două segmente de deasupra și se formează următorul simbol Y = 1. În caz contrar, dacă U AIM ≤ U ref = 512 ∆ 0, se acceptă decizia că citirea se încadrează în cele două segmente subiacente și se formează Y = 0.
Dacă X = 0, atunci ULS cu ajutorul SPSE asigură alimentarea la intrarea tensiunii de referință SS U et = 32 ∆ 0 corespunzătoare limitei inferioare a celui de-al doilea segment. Dacă U AIM ≥ U ref = 32 ∆ 0 , atunci se decide că numărătoarea se încadrează în al doilea și al treilea segment și se formează Y = 1. Dacă U AIM ≤ U ref = 32 ∆ 0 , atunci se decide că numărul cade în două segmente subiacente și se formează Y = 0.
În a patra măsură, simbolul Z este format într-un mod similar și codul numărului de segment este în final format. Ca urmare, după patru cicluri de codare, se vor forma patru simboluri ale combinației de cod de opt biți PXYZ (Figura 5.6) și se conectează una dintre cele opt tensiuni de referință corespunzătoare limitei inferioare a segmentului în care se află proba codificată. către SS.
În celelalte patru cicluri, simbolurile ABCD ale combinației de cod sunt formate secvenţial, ale căror valori depind de numărul etapei de cuantificare din segmentul corespunzător amplitudinii probei codificate. Deoarece cuantificarea uniformă se realizează în cadrul oricărui segment, procesul de codificare este implementat, ca și în codificatoarele de ponderare liniară, prin pornirea secvențială a tensiunilor de referință corespunzătoare acestui segment (Tabelul 5.2).
Workshop privind utilizarea unui encoder neliniar cu compading conform legii A = 87,6/13:
De exemplu, dacă la intrarea codificatorului este primită o probă pozitivă cu amplitudinea U AIM = 889 ∆ 0, atunci după primele patru cicluri se vor forma simbolurile PXYZ = 1110 și tensiunea de referință U et = 512 ∆ 0 va fi conectată la CC, corespunzătoare limitei inferioare a celui de-al șaselea segment, deoarece semnalul codificat se află în acest segment. În cel de-al cincilea ciclu, la acest semnal de referință se adaugă tensiunea de referință maximă U et = 256 ∆ 0 corespunzător simbolului A din determinantul pasului de cuantificare K (Figura 5.6) al celui de-al șaselea segment (Tabelul 5.2). Deoarece U AIM > U ref = (512 +256) ∆ 0, atunci se formează simbolul A = 1 și această tensiune de referință rămâne activată. În al șaselea ciclu, tensiunea de referință este conectată corespunzător simbolului B în determinantul pasului de cuantizare U et = 128 ∆ 0 și întrucât U AIM > U et = (512 +256 + 128) ∆ 0, atunci simbolul B = 1 se formează la ieșirea SS și aceasta este tensiunea de referință care rămâne activată. În al șaptelea ciclu, tensiunea de referință este conectată corespunzător simbolului C în determinantul pasului de cuantizare U et = 64 ∆ 0 și deoarece U AIM< U эт = (512 +256 + 128 + 64) ∆ 0 , то на выходе СС формируется символ С = 0. В восьмом такте вместо U эт = 64 ∆ 0 подключается эталонное напряжение соответствующее символу D в определителе шага квантования U эт = 32 ∆ 0 и так как U АИМ < U эт = (512 +256 + 128 + 32) ∆ 0 , то на выходе СС формируется символ D = 0 и это эталонное напряжение отключается и на этом процесс кодирования очередного отсчёта заканчивается. При этом на выходе кодера сформирована кодовая комбинация PXYZABCD = 11101100, соответствующая амплитуде уравновешивающего АИМ сигнала на входе СС U АИМ = 896 ∆ 0 . Разница между входным и уравновешивающим АИМ сигналами на входах СС представляет ошибку квантования δ кв = U АИМ – U АИМ = 7∆ 0 .
5.2. Ierarhii digitale
La alegerea unei ierarhii DSP trebuie luate în considerare următoarele cerințe: ratele de biți standardizate trebuie selectate ținând cont de posibilitatea utilizării sistemelor de transmisie digitală și analogică și de caracteristicile electrice ale liniilor de comunicații existente și viitoare; oferind posibilitatea combinarii atat sincrone cat si asincrone, separarii si tranzitului fluxurilor si semnalelor digitale in forma digitala. În plus, un DSP de ordin superior trebuie să satisfacă cerința ca rata de transmisie într-un semnal digital de grup să fie independentă de tipurile de informații transmise și de metoda de generare a acestui semnal.
Aceste cerințe sunt îndeplinite de ierarhia DSP europeană, care se bazează pe DSP primar PCM-30 cu o rată de transmisie a semnalului digital de grup de 2048 kbps (Ft = 2048 kHz) (Figura 5.10).

Figura 5.10. Ierarhia europeană a sistemelor de transmisie digitală
Creșterea relativă a ratei de transmisie în fiecare nivel ulterior al ierarhiei în raport cu cel precedent este asociată cu necesitatea creșterii cantității de informații de serviciu cu creșterea numărului de canale.
Ierarhia DSP cu PCM. O diagramă bloc simplificată a echipamentului TRC cu PCM este prezentată în Figura 5.11, unde, pentru simplitate, este prezentat echipamentul individual al unui canal.

Figura 5.11. O diagramă bloc simplificată a echipamentului pentru combinarea (AO) și separarea (AR) pentru RTV cu PCM
Un mesaj telefonic de la u la (t) printr-un filtru trece-jos (LPF) de sistem diferenţial (DS), care limitează spectrul semnalului cu o frecvenţă de 3,4 kHz, este transmis la intrarea modulatorului AIM (M AIM). În modulator, un semnal continuu este eșantionat, adică este convertit într-o secvență de impulsuri modulate în amplitudine care au o frecvență F d =8 kHz.
Semnalele de la AIM ale tuturor canalelor sunt combinate într-un semnal de grup AIM (vezi Figura 5.1, c), care este alimentat la compresor (Km). După comprimare, semnalul AIM de grup este cuantificat și codificat într-un encoder (Kd). De la ieșirea Kd, un semnal digital cu două niveluri este transmis la dispozitivul de combinare (UO), unde sunt recepționate impulsuri de la transmițătorul (P) SUV și de la transmițătorul semnalului de sincronizare ciclică (PCS). Astfel, în CR se formează un semnal digital de grup, a cărui structură de ciclu este prezentată în Figura 5.12.

Figura 5.12. Structura ciclului de semnal de grup al TCM cu PCM
Parametrii unui semnal digital binar nu sunt de acord cu parametrii liniilor de transmisie reale care nu trec componentele de joasă frecvență ale spectrului unui astfel de semnal. Prin urmare, semnalul binar este recodat în convertorul de cod (PCC) în așa-numitul cod de linie, în care componentele de joasă frecvență sunt slăbite și, prin urmare, caracteristicile sunt combinate mai bine cu parametrii de linie. Funcționarea tuturor blocurilor AO este sincronizată de semnalele generate de distribuitorul de canale de transmisie (RKp).
Pe partea de recepție, semnalul PCM este invers convertit într-un semnal cuantificat AIM (decodificat). Pentru a face acest lucru, un flux continuu de simboluri trebuie împărțit în grupuri de coduri, fiecare dintre ele corespunde unui eșantion al semnalului cuantificat. Semnalul decodificat este similar cu citirile cuantificate ale semnalului original u kv (iT d) (vezi Figura 5.1, a), care în spectrul lor au componente cu frecvențe Ω n ... Ω în mesajul transmis u k (t). Prin urmare, din secvența de impulsuri u* kv (iT d) mesajul primit u* k (t) este alocat folosind filtrul trece-jos.
Pe partea de recepție, semnalul este transmis prin cablu către convertorul de cod de recepție (PKpr), unde codul de linie este convertit în binar și intră în dispozitivul de separare (UR). De la ieșirea SD, semnalul de sincronizare ciclică și SUV-ul ajung la receptorii lor, iar grupurile de coduri ale semnalelor vocale din decodor (Dc) sunt convertite într-un semnal AIM de grup, care, după expander (EC), intră selectoarele de timp (TS), care se deschid pe rând și trec impulsurile AIM aferente acestui canal. Demodularea semnalului în canal se realizează în LPF.
Funcționarea AR este controlată de distribuitorul de canale de recepție (RKpr), a cărui sincronizare este realizată de frecvența de ceas alocată din semnalul digital de grup printr-un filtru de bandă îngustă situat la ieșirea PKpr și de cadru. sincronizare.
Luați în considerare metodele de sincronizare. Pentru funcționarea coordonată a AO, AR și regeneratoare, este necesar să se asigure egalitatea ratelor de procesare a semnalului, distribuția corectă a semnalelor AIM și SUV. Aceasta se realizează prin sincronizarea regeneratoarelor, a echipamentelor generatoare ale AR în funcție de frecvența de ceas și în funcție de ciclurile semnalului digital recepționat.
Cu N gr intervale de canal și m biți în grupuri de coduri de informații, frecvența de ceas a semnalului digital de grup
F t \u003d F d ∙ m ∙ N gr. (5,7)
Deci, pentru sistemul PCM-30, proiectat pentru N gr = 32 de intervale de canale cu un grup de cod de opt biți, Ft = 8∙8∙32 = 2048 kHz. Semnalul digital de grup u PCM (t) este o secvență aleatorie de impulsuri binare (Figura 5.1, c). Această secvență poate fi reprezentată ca o sumă de secvențe periodice și aleatorii. Secvența periodică de impulsuri are un spectru discret iar la τ și egală cu T și T/2, componentele discrete vor avea frecvențe F=0; F t și așa mai departe (vezi Figura 5.13, unde aceste componente sunt marcate cu puncte). O secvență bipolară aleatoare definește un spectru continuu (Figura 5.13) al secvenței binare originale.

Figura 5.13. Spectrul de energie al unei secvențe aleatoare de impulsuri binare (a, b) și a unui semnal PRF (c) (componentele spectrului discret sunt marcate cu puncte)
Din figura 5.13 rezultă că energia maximă a ceasului are o secvență binară aleatorie cu τ și = T/2. Oscilațiile cu o frecvență de ceas Ft sunt separate de o astfel de secvență printr-un filtru de bandă îngustă și sunt utilizate în regenerator pentru a sincroniza funcționarea dispozitivului de decizie.
Sistemul de încadrare determină începutul ciclului de transmisie și asigură distribuția valorilor eșantionului de semnale analogice decodificate la capătul de recepție pe canalele sale, în concordanță cu AO. Inexactitatea sincronizării cadrelor duce la o creștere a probabilității de erori în canalele de informații. Pentru a crește imunitatea la zgomot, un grup de simboluri ale unei structuri constante cu o rată de repetiție de 4 kHz este utilizat ca semnal de ceas ciclic (Figura 5.12), adică DS sunt transmise printr-un ciclu de transmisie.
Luați în considerare integrarea DSP bazată pe intrarea asincronă a semnalelor digitale. Necesitatea de a combina fluxuri digitale apare atunci când se formează un semnal digital de grup din fluxuri digitale ale sistemelor de ordin inferior, din diverse semnale transmise în formă digitală, precum și atunci când semnale discrete din diverse surse de informații sunt introduse într-un semnal digital de grup (Figura 5.14). Fluxurile digitale sunt generate în DSP, ale cărui oscilatoare master pot fi sincronizate sau nu cu oscilatorul master al echipamentului de combinare. În conformitate cu aceasta, se realizează o combinație sincronă sau asincronă de fluxuri digitale.

Figura 5.14. Diagrama bloc simplificată (a) caracter cu caracter (b) și canal cu canal (c) combinație de fluxuri digitale
Pentru a combina temporar fluxurile digitale asincrone, trebuie mai întâi să le coordonați vitezele, adică să le „legați” la o frecvență de referință. La recepție, semnalul total este distribuit către ieșirile corespunzătoare. Biții care vin la intrarea sistemului de transmisie din patru fluxuri de informații sunt scrieți în celulele de memorie ale dispozitivului de memorie (memorie), apoi citiți din ele și trimiși la linie. Dacă conținutul celulelor de memorie a fost considerat mai rapid, s-a format un interval de timp „gol” pentru inserarea impulsurilor de sincronizare. Periodicitatea strictă a unui semnal de ceas este una dintre cele mai importante proprietăți pentru recunoașterea acestuia.
Dacă generatorul se dovedește a fi instabil, atunci va exista o schimbare în timp a intervalelor „goale” și va fi încălcată periodicitatea strictă a repetării acestora. Sistemul de sincronizare și toate echipamentele în ansamblu pot eșua. Pentru a evita acest lucru, aplicați procedura de aliniere a vitezei sau, așa cum este adesea numită, potrivirea vitezei.
Un controler special monitorizează poziția reciprocă a impulsurilor de scriere și de citire, iar dacă impulsurile de citit încep să urmeze mai repede (distanța dintre perechile adiacente ale acestor impulsuri scade), atunci controlerul semnalează că intervalul „gol” a apărut înainte de timp. . Un alt dispozitiv introduce un impuls fals în intervalul gol care nu poartă nicio informație. În acest caz, avem de-a face cu potrivirea vitezei pozitive.
Procedura de potrivire a vitezei descrisă mai sus se numește personal (din engleză „staffing” - insert). Este trimisă o comandă către stația de recepție conform căreia a avut loc potrivirea vitezei pentru a elimina impulsul fals. Pentru fiabilitate, comanda de potrivire a ratei este duplicată de mai multe ori, de exemplu, este trimisă de trei ori.
Dacă generatorul generează impulsuri de citire mai rar și un interval „gol” ar trebui să apară deja în fluxul digital, iar impulsurile de ceas nu au citit încă impulsul de informare care îl precede din memorie, atunci va trebui să excludeți un bit suplimentar din flux digital și oferă un interval de timp pentru transmiterea următorului impuls de sincronizare. Acest acord se numește negativ.
Astfel, este necesar să se informeze postul receptor care acord a avut loc: pozitiv sau negativ. În acest scop se introduce comanda „Tip de acord”, trimițând 1 pe celălalt canal de serviciu pentru acord pozitiv și 0 pentru acord negativ. De asemenea, se repetă de trei ori. Astfel, informațiile despre îndepărtarea sau adăugarea unui impuls sunt transmise în poziții de puls special alocate, iar pe baza acestor informații, pe partea de recepție, la împărțirea fluxurilor digitale, vitezele acestora sunt restabilite (Figura 5.14). Combinația de fluxuri cu egalizarea vitezei a fost numită plesiocronă, adică aproape sincronă, iar ierarhia existentă a ratelor de transmisie a fluxurilor digitale și, prin urmare, a sistemelor de transmisie de tip PCM, a fost numită ierarhie digitală plesiocronă (în engleză PDH - Ierarhia digitală Plesiohronous).
Cu metoda asincronă de combinare în blocuri de interfață digitală banda BCS (Figura 5.14), vitezele fluxurilor digitale ale sistemelor combinate sunt aduse în concordanță cu raportul lor cu frecvența de ceas a fluxului combinat și cu pozițiile de timp necesare ale semnalelor de fluxurile combinate sunt setate (KCP - digital stream collector, RDP - digital stream distributor). Pentru a sincroniza calea de transmisie și recepție prin fluxul digital multicast, acesta este împărțit în cicluri, la începutul cărora se introduce un semnal de sincronizare (Figura 5.14, b și c). Odată cu combinarea canal-cu-canal a fluxurilor digitale, intervalele alocate pentru grupurile de cod sunt restrânse și distribuite în timp (Figura 5.14, c).
Aceste ierarhii, cunoscute colectiv ca PDH sau PDH, sunt rezumate în Tabelul 5.3.
Tabelul 5.3 - Compararea ierarhiilor
| nivel digital |
Viteze de viteză corespunzătoare |
||
| AC: 1544 kbps |
YAS: 1544 Kbps |
EC: 2048 kbps |
|
Unde: AC - schema americană;
YaS - schema japoneză;
UE este schema europeană.
Dar PDH a avut o serie de dezavantaje, și anume:
- intrare/ieșire dificilă a fluxurilor digitale în puncte intermediare;
- lipsa mijloacelor de control și management automat al rețelei;
- recuperarea în mai multe etape a sincronismului necesită un timp destul de lung;
Aceste deficiențe ale PDH, precum și o serie de alți factori, au condus la dezvoltarea în Europa a unei ierarhii digitale SDH sincrone similare.
Ierarhie digitală sincronă.
Noua ierarhie digitală SDH este o modalitate de a multiplexa diferite date digitale într-o singură unitate numită modul de transport sincron (STM), pentru a transmite acest modul prin linia de comunicație. O structură STM simplificată este prezentată în Figura 5.15:

Figura 5.15 - Structura modulului de transport sincron STM-1
Modulul este un cadru (cadru) 9∙270 = 2430 octeți. Pe lângă informația transmisă (numită sarcină utilă în literatură), conține în a 4-a linie un pointer (Pointer, PTR) care determină începutul înregistrării sarcinii utile.
O secțiune peste cap (SOH) este scrisă în partea stângă a cadrului pentru a defini calea modulului de transport. Cei mai mici 5∙9 = 45 de octeți (după pointer) sunt responsabili pentru livrarea informațiilor către acel loc din rețea, către acel multiplexor unde acest modul de transport va fi reformatat. Această parte a antetului este numită antetul secțiunii multiplexerului (MSOH). Primii 3∙9 = 27 de octeți (înainte de indicator) sunt antetul secțiunii regeneratorului (RSOH), unde fluxul deteriorat de zgomot va fi restabilit și erorile vor fi corectate în acesta.
Un ciclu de transmisie include o linie de citire a unui astfel de tabel dreptunghiular. Ordinea octetilor este de la stânga la dreapta, de sus în jos (la fel ca atunci când citiți textul pe o pagină). Timpul ciclului de transmisie STM-1 este de 125 µs, adică se repetă la o frecvență de 8 kHz. Fiecare celulă corespunde unei rate de transmisie de 8 biți ∙ 8 kHz = 64 kbps. Aceasta înseamnă că dacă cheltuim 125 μs pentru transmiterea către linia fiecărui cadru dreptunghiular, atunci 9∙270∙64 Kbps = 155520 Kbps vor fi transmise la linie pe secundă, adică. 155 Mbps.
Tabelul 5.4 - Ierarhie digitală sincronă
| Nivel |
Tip sincron |
Rata de transfer, Mbps |
Pentru a crea fluxuri digitale mai puternice în sistemele SDH, se formează următoarea ierarhie de mare viteză (Tabelul 5.4): 4 module STM-1 sunt combinate prin multiplexare de octeți într-un modul STM-4 transmis la o viteză de 622,080 Mbps; apoi 4 module STM-4 sunt combinate într-un modul STM-16 cu o rată de transmisie de 2488,320 Mbps; în cele din urmă, 4 module STM-16 pot fi combinate într-un modul STM-64 de mare viteză (9953,280 Mbps).
Figura 5.17 prezintă formarea modulului STM-16. În primul rând, fiecare 4 module STM-1 sunt combinate într-un modul STM-4 folosind multiplexoare cu patru intrări, apoi patru module STM-4 sunt multiplexate de același multiplexor cu patru intrări într-un modul STM-16. Cu toate acestea, există un multiplexor cu 16 intrări care poate combina simultan 16 module STM-1 într-un singur modul STM-16.

Figura 5.16 - Formarea modulului de transport sincron STM-16
Formarea modulului STM-1. Principiile transportului de containere sunt aplicate în rețeaua SDH. Semnalele care urmează a fi transportate sunt introduse în prealabil în containere standard (Container - C). Toate operațiunile cu containere sunt efectuate indiferent de conținutul acestora, astfel încât se realizează transparența rețelei SDH, adică. capacitatea de a transporta diferite semnale, în special semnale PDH.
Cel mai apropiat ca viteză de primul nivel al ierarhiei SDH (155,520 Mbps) este un flux digital cu o viteză de 139,264 Mbps, format la ieșirea echipamentului ierarhic digital plesiocron IKM-1920. Cel mai ușor este să-l plasați în modulul STM-1. Pentru a face acest lucru, semnalul digital de intrare este mai întâi „împachetat” într-un container (adică plasat în anumite poziții din ciclul său), care este desemnat C-4.
Cadrul containerului C-4 conține 9 rânduri și 260 de coloane de un octet. Adăugând o altă coloană în stânga - un antet de rută sau cale (Path Over Head - RON) - acest container este convertit într-un container virtual VC-4.
În final, pentru a plasa containerul virtual VC-4 în modulul STM-1, acesta este prevăzut cu un pointer (PTR), formând astfel o unitate administrativă AU-4 (Unitate Administrativă), iar aceasta din urmă este plasată direct în STM- 1 modul împreună cu antetul secțiunii SOH (figura 5.17 și figura 5.18).
Modulul de transport sincron STM-1 poate fi încărcat și cu fluxuri plesiocrone la 2,048 Mbps. Astfel de fluxuri sunt generate de echipamentele IKM-30 și sunt utilizate pe scară largă în rețelele moderne. Pentru „ambalarea” inițială se folosește un container C12. Semnalul digital este plasat pe anumite poziții ale acestui container. Prin adăugarea unui antet de rutare sau transport (RON), se formează un container virtual VC-12. Containerele virtuale sunt formate și desființate în punctele de terminare a căii.

Figura 5.17. Amplasarea containerelor în modulul STM-1
STM-1 poate găzdui 63 de VC-12. Procedând astfel, procedați după cum urmează. Containerul virtual VC-12 este prevăzut cu un indicator (PTR) și formează astfel o unitate de transport TU-12 (Unitate Tributară). Acum, fluxurile digitale ale diferitelor blocuri de transport pot fi combinate într-un flux digital de 155,520 Mbit/s (Figura 5.18). Mai întâi, trei TU-12 sunt multiplexate într-un grup de blocuri de transport TUG-2 (grup de unități tributare), apoi șapte TUG-2 sunt multiplexate în grupuri de unități de transport TUG-3 și trei TUG-3 sunt combinate împreună și plasate într-un sistem virtual. container VC-4. În plus, calea de transformare este cunoscută.
În figura 5.18 se arată și modul de plasare în STM-N, N=1,4,16 fluxuri digitale diferite din echipamentul ierarhiei digitale plesiocrone. Sunt plasate fluxuri digitale plesiocrone de toate nivelurile
în containere C folosind procedura de egalizare a vitezei (pozitiv, negativ și bidirecțional).
Prezența unui număr mare de pointeri (PTR) vă permite să faceți complet
identificați clar locația în modulul STM-N a oricărui digital
debit cu viteze de 2.048; 34.368 și 139.264 Mbps. Multiplexoare I/O disponibile industrial (Add/Drop Multiplexer -
ADM) vă permit să ramificați și să adăugați orice fluxuri digitale.

Figura 5.18. Introducerea fluxurilor digitale plesiocrone în modulul de transport sincron STM-N
O caracteristică importantă a echipamentului SDH este că, pe lângă informațiile de rutare, se creează o mulțime de informații în anteturile de cale și de rețea, ceea ce face posibilă monitorizarea și controlul întregii rețele în ansamblu, pentru a efectua comutarea de la distanță în multiplexoare. la cererea clienților, să monitorizeze și să diagnosticheze, să detecteze și să elimine defecțiunile în timp util, să implementeze funcționarea eficientă a rețelei și să mențină calitatea înaltă a serviciilor oferite.
Ierarhiile PDH și SDH interacționează prin proceduri pentru multiplexarea și demultiplexarea fluxurilor PDH în sistemele SDH.
Principala diferență dintre sistemul SDH și sistemul PDH este trecerea la un nou principiu de multiplexare. Sistemul SDH realizează multiplexarea/demultiplexarea sincronă, ceea ce vă permite să organizați accesul direct la canalele PDH care sunt transmise în rețeaua SDH. Această inovație destul de importantă și simplă în tehnologie a dus la faptul că, în general, tehnologia de multiplexare în rețeaua SDH este mult mai complicată decât tehnologia din rețeaua PDH, cerințele de sincronizare și parametrii de calitate ai mediului de transmisie și transmisie. sistem a crescut, iar numărul de parametri esențiali pentru funcționarea rețelei.
Întrebări de test:
- Ce este un semnal digital?
- Enumerați principalele avantaje ale comunicării digitale față de analogice?
- Dați conceptul de viteză de transmisie?
- Cu ce viteză ar trebui eșantionat semnalul analogic?
- Explicați esența cuantizării?
- Cum se determină eroarea de cuantificare a semnalului?
- Notează numărul 859 în binar.
- Codați o citire pozitivă de 358 mA într-un cod simetric de opt biți. Care este eroarea de cuantizare?
- Dați conceptul de ierarhie digitală plesiocronă?
- De ce este necesar să se potrivească ratele de transmisie ale diferitelor fluxuri atunci când acestea sunt combinate într-un flux de mare viteză? Cum se realizează coordonarea?
- Principiul ierarhiei digitale sincrone, avantajele sale în comparație cu ierarhia digitală plesiocronă?
- Pentru ce este un pointer (PTR)?
- Descrieți structura modulului de transport sincron.
- Cum STM-N găzduiește trei fluxuri la o rată de 34,368 Mbps de la echipamentul ierarhiei digitale plesiocrone PCM-480.
Semnal (din lat. signum-semn)- un semn, un proces fizic (sau fenomen) care poartă informații despre un eveniment, starea unui obiect de observație, sau transmite comenzi de control, instrucțiuni, alerte.
Semnal este un purtător material de informație care este transmisă de la sursă la consumator.
Semnal este un proces fizic care variază în timp. Un astfel de proces poate conține diferite caracteristici. Atunci când un semnal interacționează cu corpurile fizice, apar anumite modificări ale proprietăților acestor corpuri, care pot fi înregistrate. Astfel, vom presupune că datele sunt semnale înregistrate. Caracteristica care este folosită pentru a reprezenta datele se numește parametru de semnal. Dacă un parametru de semnal ia o serie de valori consecutive și un număr finit al acestora, semnalul este apelat discret. Dacă parametrul semnalului este o funcție continuă, atunci semnalul se spune că este continuu.
Cuantificarea semnalului- conversia unui semnal într-o secvență de impulsuri (cuantificarea semnalului în timp) sau într-un semnal cu o modificare treptată a amplitudinii (cuantificarea semnalului după nivel), precum și simultan atât în timp, cât și în nivel. Este folosit la conversia unei valori continue într-un cod în dispozitive de calcul, instrumente digitale de măsură etc.
Datele, desigur, transportă informații, dar nu sunt identice cu acestea. Pentru ca datele să devină informații, este necesar să existe metode de conversie a unei valori în alta. Datele sunt o componentă dialectică a informației. Conform metodei de înregistrare, datele pot fi stocate și transportate pe diverse tipuri de suporturi.
Hârtia este cel mai utilizat mediu de stocare astăzi. Pe hârtie, datele sunt înregistrate prin modificarea caracteristicilor optice ale suprafeței sale. În același timp, o modificare a reflectanței suprafeței într-un anumit interval de lungimi de undă este utilizată în dispozitivele care înregistrează cu un fascicul laser pe suporturi din plastic cu un strat reflectorizant (CD ROM). Benzile magnetice și discurile magnetice, care servesc ca principali purtători de informații în computerele moderne, folosesc o modificare a proprietăților magnetice ale corpului. Proprietățile informațiilor primite de utilizator sunt strâns legate de proprietățile suporturilor de date de la care vor fi obținute aceste informații. Orice purtător poate fi caracterizat prin parametru rezoluţie, adică cantitatea de date înregistrată în unitatea de măsură acceptată pe suport, și interval dinamic- raportul logaritmic al intensității amplitudinilor semnalului maxim și minim înregistrat. Asemenea proprietăți ale informațiilor precum completitudinea, accesibilitatea și fiabilitatea depind de aceste proprietăți ale transportatorului. Sarcina de transformare a datelor în vederea schimbării purtătorului este una dintre cele mai importante sarcini ale informaticii. În costul sistemelor de calcul, dispozitivele de intrare și ieșire a datelor care lucrează cu purtători de informații reprezintă cel puțin jumătate din costul hardware-ului.
Cauzând unitatea dialectică a datelor și metodelor în procesul informațional, sunt definite următoarele concepte.
Natura dinamică a informațiilor. Datele sunt statice. Informațiile se schimbă dinamic și există doar în momentul interacțiunii dintre date și metode. Astfel, informația există doar în momentul procesului de informare. Restul timpului este conținut sub formă de date.
Cerințe pentru adecvarea metodelor. Aceleași date pot furniza informații diferite la momentul consumului, în funcție de gradul de adecvare al metodelor care interacționează cu acestea. Folosirea unor metode mai adecvate va oferi informații mai complete.
Natura dialectică a interacțiunii datelor și metodelor. Datele sunt obiective, sunt rezultatul înregistrării unor semnale obiectiv existente cauzate de modificări în câmpuri sau corpuri materiale. În același timp, metodele sunt subiective. Metodele artificiale se bazează pe un algoritm, adică. o secvență ordonată de comenzi compilată și pregătită de o persoană (subiect). Metodele naturale se bazează pe proprietățile biologice ale subiecților procesului informațional.
Astfel, informația ia naștere și există în momentul interacțiunii dialectice a datelor obiective și a metodelor subiective.
Pentru a automatiza lucrul cu date aparținând diferitelor tipuri și purtând informații diferite, este foarte important să se unifice forma prezentării acestora. Pentru aceasta, se folosește de obicei codificarea.
Codificarea este o expresie a datelor de un tip în termeni de date de alt tip.
Limbile umane naturale nu sunt altceva decât sisteme de codificare a conceptelor pentru exprimarea gândurilor prin vorbire.
În tehnologia calculatoarelor se lucrează cu informații numerice. Alte texte informative, sunete, imagini etc. pentru prelucrare într-un mediu de calcul trebuie convertite într-o formă numerică. În acest caz, toate numerele sunt înregistrate în memoria computerului folosind așa-numita codificare binară. Codarea binară se bazează pe reprezentarea datelor ca o secvență de numai două caractere 0 și 1. Aceste caractere sunt numite cifre binare, în engleză binary digit sau abreviat (bit) bit.
Sistemul de codare binară nu a fost ales întâmplător. Este ușor de implementat tehnic. Circuitele electronice pentru procesarea codurilor binare trebuie să fie într-una din cele două stări „semnal/fără semnal” sau „înaltă/joasă” tensiune etc. Schema este ușor de comutat de la o stare la alta.
Pic- cea mai mică unitate de informație în calcul. O cifră binară.
Un grup de opt biți se numește octet și oferă baza pentru stocarea informațiilor în memoria unui computer.
- 1024 octeți = 1 kilooctet (KB)
- 1024 kiloocteți = 1 megaoctet (MB)
- 1024 megaocteți = 1 gigaoctet (GB)
Pentru o înțelegere corectă a modului în care informațiile sunt reprezentate în memoria unui computer, să luăm în considerare diferitele sisteme numerice utilizate de instrumentele de calcul moderne.
Notaţie este un set de reguli pentru denumirea și afișarea numerelor folosind un set de caractere.
Sistemele numerice sunt pozițional și non-pozițional.
Sistem numeric non-pozițional- Acesta este un sistem în care ordinea unei cifre într-un număr este determinată conform unei reguli stabilite. De exemplu, sistemul numeric nepozițional este sistemul „roman”.
Sistemul numeric pozițional, se numește sistem - în care ordinea unei cifre într-un număr este determinată de o serie de grade ale unui număr, care este baza unui sistem numeric dat.
În general, un număr întreg din sistemul numeric pozițional poate fi reprezentat prin expresia:
N (m) = k0 * m0 + k1 * m1 +...kn-1 * mn-1, unde
N(m) - număr în al m-lea sistem numeric;
m - capacitatea sistemului (sisteme binare, octale, zecimale, hexazecimale m = 2; m = 8; m = 10, m = 16);
n este numărul de cifre din număr;
k este o cifră a numărului.
Să luăm în considerare modul în care numerele sunt scrise în sistemele de numere poziționale utilizate de tehnologia computerizată modernă.
Sistem de numere zecimale.
Baza sistemului zecimal este o serie de puteri de 10. Capacitatea sistemului este m = 10. Există 10 cifre în sistemul numeric zecimal (de la 0 la 9). Luați, de exemplu, numărul zecimal 1957. Numărul este format din patru cifre - patru cifre, adică. n=4. Folosind formula de mai sus, obținem numărul în sistemul numeric zecimal.
N(10) = 7*100 + 5*101 + 9*102 + 1*103 = 1957
Sistem de numere binar.
Baza sistemului binar este o serie de puteri a numărului 2. Capacitatea sistemului este m = 2. Există 2 cifre în sistemul numeric binar (0 și 1). Luați, de exemplu, numărul binar 100011B (identificatorul B al sistemului de numere binar). Numărul este format din șase cifre - șase cifre, adică. n = 6. Folosind formula de mai sus, obținem un număr zecimal.
N(2) = 1*20 + 1*21 + 0*22 + 0*23 + 0*24 + 1*25 = 35, adică. număr binar 100011B = număr zecimal 35.
Rețineți că aceleași cifre pot fi folosite pentru a scrie numere în sistemele de numere poziționale. Deci numerele 0 și 1 sunt folosite atât în sistemele zecimale, cât și în cele binar. Prin urmare, în scrierea numerelor unui sistem de numere non-zecimal, este obișnuit să folosiți litere care sunt identificatori ai sistemelor de numere și vă permit să distingeți numerele dintr-un sistem numeric de altul.
Sistem de numere octale
Baza sistemului octal este un număr de puteri de 8. Capacitatea sistemului este m = 8. Există 8 cifre în sistemul de numere octale (de la 0 la 7). Luați, de exemplu, numărul octal 573Q (identificatorul Q al sistemului de numere octale). Numărul este format din trei cifre - trei cifre, adică. n = 3. Folosind formula de mai sus, obținem un număr zecimal.
N(8) = 3*80 + 7*81 + 5*82 = 379, i.e. număr octal 573Q = număr zecimal 379.
Sistem de numere hexazecimale.
Baza sistemului hexazecimal este o serie de puteri de 16. Capacitatea sistemului este m = 16. Există 16 cifre în sistemul numeric hexazecimal (de la 0 la F), primele zece cifre de la 0 la 9 coincid cu cifrele sistemului zecimal, iar apoi urmează numerele: A - numărul zece ; B - numărul unsprezece; C - numărul doisprezece; D - numărul treisprezece; E - numărul paisprezece; F este numărul cincisprezece. Luați, de exemplu, numărul hexazecimal 1A7H (identificatorul H al sistemului numeric hexazecimal). Numărul este format din trei cifre - trei cifre, adică. n = 3. Folosind formula de mai sus, obținem un număr zecimal.
N(16) = 7*160 + 10*161 + 1*162 = 423, i.e. număr hexazecimal 1A7H = număr zecimal 423.
De fiecare dată când calculăm numărul N(m) folosind formula de mai sus, obținem un număr în sistemul zecimal. Astfel, am tradus numerele din sistemele 2, 8 și 16 în sistemul numeric zecimal.
Pentru a transmite un semnal de vorbire pe un canal de comunicație digital, este necesară o procedură de conversie analog-digitală (ADC), care constă din 3 etape: eșantionare, cuantizare și codare. Discretizarea este procedura de luare a valorilor semnalului individual la intervale regulate.
În acest caz, cu cât sunt utilizate mai multe niveluri, cu atât mai precis va fi posibil să se restabilească semnalul la forma sa originală la capătul de recepție.
Majoritatea semnalelor sunt inițial generate în formă analogică. Ele sunt apoi convertite în semnale digitale folosind convertoare analog-digitale (ADC). În viitor, acestea sunt din nou convertite în semnale analogice folosind convertoare digital-analogice (DAC). Aceste convertoare sunt parte integrantă a oricărui sistem digital:
Semnal analogic - Eșantionare - Cuantizare - Codare - Semnal digital
Probă
Într-un semnal analogic, amplitudinea tensiunii se modifică continuu în timp. La eșantionare, amplitudinea este citită la intervale regulate. Această rată de eșantionare sau rata de eșantionare determină durata de timp sau cât de des este efectuată o citire. Dacă rata de eșantionare este prea mare, precizia conversiei este mai mare, dar lățimea de bandă necesară crește foarte mult costul designului și al componentelor. Dacă rata de eșantionare este prea mică, este posibil ca rezultatul final să nu se potrivească cu semnalul analogic.
Cuantizarea
Cuantizarea este procesul de reprezentare a tuturor mostrelor în formă digitală. Lățimea eșantionului este modificarea semnalului analogic între două mostre. Pentru a reprezenta valoarea numerică a lățimii eșantionului, se ia de obicei o valoare medie. Mărimea eșantionului determină nivelul de cuantizare utilizat pentru cuantificarea eșantionului. Utilizarea a 8 biți oferă 256 de niveluri de cuantizare, în timp ce 12 biți vă permit să obțineți 4096 de niveluri. Precizia eșantionării este mai mare dacă sunt utilizați mai mulți biți, cu toate acestea, numărul de biți de transmis crește, necesitând mai multă lățime de bandă. Din acest motiv, majoritatea sistemelor digitale folosesc 8 biți pentru cuantizarea eșantionului.
Codificarea
Codificarea este ultimul pas în procesul de conversie A/D. În cursul codificării pentru fiecare probă se formează valoarea exprimată într-un cod binar. În plus, codificarea include: biți care le spun altor echipamente cum să interpreteze datele, informații despre sfârșitul ceasului, informații despre începutul cadrului, biți de protecție împotriva erorilor pentru a reduce erorile de transmisie și stocare.
Protecție împotriva erorilor
Protecția împotriva erorilor este asigurată prin adăugarea de biți suplimentari în timpul codării. Pe partea de recepție este recunoscut - dacă acest bit s-a schimbat, atunci sistemul înțelege că a apărut o eroare.
Eroare:
Există mai multe surse de eroare ADC. Erorile de cuantizare și (presupunând că ADC-ul trebuie să fie liniar) neliniaritățile sunt inerente în orice conversie analog-digitală. În plus, există așa-numitele erori de deschidere, care sunt rezultatul jitterului (jitter englezesc) al generatorului de ceas, ele apar la conversia semnalului în ansamblu (și nu doar un eșantion).
Aceste erori sunt măsurate în unități numite LSB - Least Significant Bit. În exemplul ADC pe 8 biți de mai sus, eroarea în 1 LSB este 1/256 din gama completă a semnalului, adică 0,4%.
Atunci când utilizați un computer pentru a procesa informații de la diferite dispozitive (obiecte, procese), în care informațiile sunt reprezentate de semnale continue (analogice), este necesar să convertiți un semnal analogic într-unul digital - într-un număr proporțional cu amplitudinea acestuia. semnal și invers. În general, procedura de conversie analog-digitală constă din trei etape:
discretizare;
cuantificare pe nivel;
codificare.
Sub discretizare înțelegeți transformarea unei funcție de timp continuu într-o funcție de timp discret, iar procesul de discretizare în sine constă în înlocuirea unei funcții continue cu valorile sale individuale în momente fixe în timp.
Discretizarea poate fi uniformă sau neuniformă. În cazul eșantionării neuniforme, durata intervalelor dintre probe este diferită. Eșantionarea uniformă cel mai frecvent utilizată, în care durata intervalului dintre probe T D, este constantă. Perioada de prelevare T D semnal continuu u(t)(Fig. 1 a) este selectat în conformitate cu teorema Kotelnikov:
Unde F în- cea mai mare frecvență din spectrul de frecvență al semnalului u(t)(Fig. 1 b)

Orez. 1.Procesul de conversie A/D
Sub cuantizarea înțelegeți transformarea unei cantități cu o scară continuă de valori într-o mărime cu o scară discretă de valori.
Pentru aceasta, întreaga gamă de valori ale semnalului u(t), numită scară este împărțită în părți egale - cuante, h- pas de cuantizare. Procesul de cuantificare se reduce la înlocuirea oricărei valori instantanee cu una dintr-un set finit de valori permise, numite niveluri de cuantizare.
Tipul semnalului u(t) ca urmare a operaţiilor comune de eşantionare şi cuantificare este prezentată în fig. 1 c). Valoarea semnalului discret u(t), situat între două niveluri de cuantizare este identificat cu cel mai apropiat nivel de cuantizare. Acest lucru duce la erori de cuantizare, care sunt întotdeauna mai mici decât pasul de cuantizare (cuantum), adică cu cât este mai mic pasul de cuantizare, cu atât eroarea de cuantizare este mai mică, dar cu atât nivelurile de cuantizare sunt mai mari.
Numărul de niveluri de cuantizare din fig. 1 c) este egal cu opt. De obicei, sunt mult mai mulți. Puteți numerota nivelurile și le puteți exprima în sistemul de numere binar. Pentru opt niveluri, trei biți sunt suficienți. Fiecare valoare a semnalului discret este reprezentată în acest caz printr-un cod binar (Tabelul 1) ca o secvență de semnale de două niveluri.
Tabelul 6.1
Prezența sau absența unui impuls într-un anumit loc este interpretată prin unu sau zero în bitul corespunzător al unui număr binar. Reprezentarea semnalului digital u(t) prezentată în fig. 1 g). Impulsurile celor mai semnificativi biți sunt situate în extrema dreaptă.
Τᴀᴋᴎᴍ ᴏϬᴩᴀᴈᴏᴍ, ca rezultat al eșantionării, cuantizării și codificării semnalului analogic, obținem secvența n-cuvinte de cod de biți care urmează cu o perioadă de eșantionare T l.În același timp, implementarea rațională a operațiunilor de discretizare și cuantizare conduce la un efect economic semnificativ, atât prin reducerea costului de stocare și prelucrare a informațiilor primite, cât și prin reducerea timpului de procesare a informațiilor.
În practică, conversia unui semnal analogic în formă digitală se realizează folosind un convertor analog-digital (ADC). Pentru a rezolva problema inversă a conversiei unui număr într-o valoare analogică proporțională, reprezentată ca tensiune electrică, curent etc., se folosește un convertor digital-analogic (DAC). În DAC, fiecare cuvânt de cod binar este convertit într-un semnal analogic și o secvență de impulsuri modulate în amplitudine cu o perioadă T l.